




Công nghệ hợp nhất cảm biến tích hợp dữ liệu từ nhiều cảm biến để cung cấp hiểu biết toàn diện và chính xác về môi trường hoặc hệ thống đang được giám sát hoặc kiểm soát.
Con người có thể thực hiện các nhiệm vụ phức tạp như lái xe hoặc chơi thể thao vì họ có nhiều giác quan, chẳng hạn như thính giác, thị giác, xúc giác và thăng bằng. Bộ não của chúng ta có thể tích hợp tất cả các thông tin đầu vào này và đưa ra quyết định tức thời về việc phải làm gì trong cả những trường hợp bình thường và bất ngờ. Chúng ta cũng có kinh nghiệm trước đó với những hoạt động này, giúp bổ sung bối cảnh. Chúng ta cũng có thể bổ sung những trải nghiệm mới vào kho kiến thức của mình và cải thiện hiệu suất.
Máy móc đơn giản được chế tạo với các cảm biến đơn lẻ. Ví dụ, thang máy và máy mở cửa nhà để xe sử dụng cảm biến quang học để tránh đóng sầm vào người.
Máy móc tiên tiến phải có khả năng tích hợp và xử lý dữ liệu đầu ra của nhiều cảm biến để thực hiện các nhiệm vụ phức tạp như lái ô tô, lái máy bay hoặc chơi bóng đá.
Lưu ý: Hợp nhất cảm biến đôi khi được gọi là “hợp nhất đa cảm biến” hoặc “hợp nhất dữ liệu đa cảm biến”, nhưng về cơ bản chúng giống nhau.
Có nhiều cấp độ hợp nhất cảm biến khác nhau. Hợp nhất cảm biến cấp cao đề cập đến việc tích hợp và xử lý dữ liệu từ nhiều cảm biến hoặc nguồn để trích xuất thông tin và hiểu biết có ý nghĩa ở cấp độ trừu tượng.
Công nghệ cảm biến và kỹ thuật hợp nhất cảm biến đang phát triển nhanh chóng trong ngành công nghiệp ô tô, được thúc đẩy bởi xu hướng xe tự lái. Nhưng không chỉ riêng ô tô: công nghệ hợp nhất cảm biến ngày nay được sử dụng trong ngày càng nhiều lĩnh vực, bao gồm robot, quốc phòng, y học, y tế từ xa và xử lý hình ảnh, cùng nhiều lĩnh vực khác.
Công nghệ hợp nhất cảm biến chính
Sau đây là các công nghệ phần cứng và phần mềm quan trọng đằng sau công nghệ hợp nhất cảm biến.
Cảm biến tiên tiến
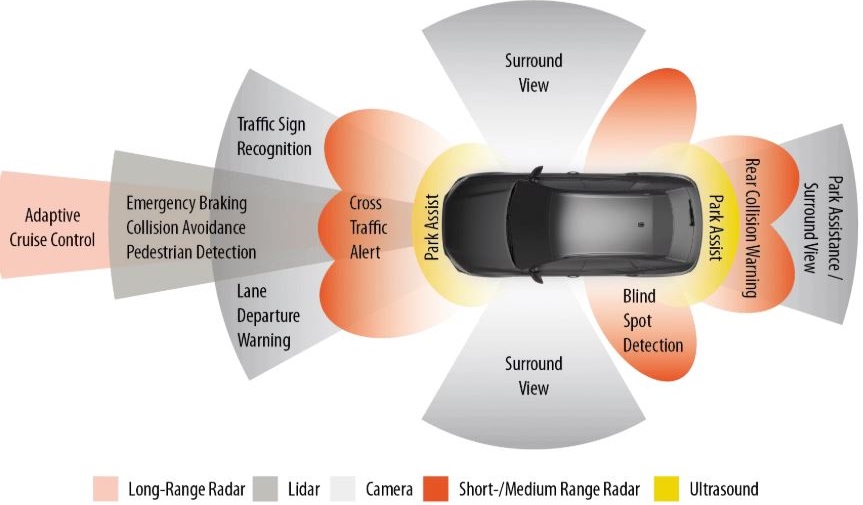
Tiến bộ công nghệ trên nhiều loại cảm biến riêng lẻ là nền tảng cho việc hợp nhất cảm biến. Cảm biến thu thập thông tin hình ảnh, không gian và thời gian về môi trường hoặc vật thể đang được kiểm tra, bao gồm:
- Cảm biến RADAR (Phát hiện và Đo khoảng cách bằng sóng vô tuyến) có thể phát hiện vật thể phía trước xe đang di chuyển với tốc độ cao. Chúng cũng hoạt động rất tốt trong điều kiện thời tiết xấu.
- Cảm biến LiDAR (Phát hiện và Đo khoảng cách bằng Ánh sáng) cung cấp dữ liệu 3D độ phân giải cao, cho phép lập bản đồ môi trường và phát hiện chướng ngại vật chính xác, đồng thời không cần ánh sáng môi trường để hoạt động. LiDAR tạo ra bản đồ 3D thang độ xám gọi là "đám mây điểm".
- LiDAR đa phổ kết hợp LiDAR với các cảm biến khác, chẳng hạn như camera và máy quang phổ, để cung cấp thêm thông tin môi trường, bao gồm cả màu sắc. Hình trên là hình chiếu trực giao của một đám mây điểm do ô tô chụp. Các điểm được tính dựa trên cường độ tín hiệu nhân với phạm vi, với màu cam biểu thị vùng sáng hơn và màu xanh lam biểu thị vùng tối hơn.
- Camera thực hiện phát hiện vật thể, vạch kẻ đường, nhận dạng và đọc biển báo giao thông, phân đoạn ngữ nghĩa và nhận dạng màu sắc. Kết hợp với thuật toán OCR, hình ảnh camera có thể "đọc" văn bản trên biển báo giao thông, trích xuất ý nghĩa quan trọng.
- GNSS (Hệ thống vệ tinh định vị toàn cầu) sử dụng vệ tinh trên cao để cung cấp định vị chính xác. Tuy nhiên, chúng không hoạt động khi đường hầm, nhà để xe hoặc tòa nhà cao tầng che khuất tầm nhìn.
- Cảm biến IMU (Inertial Measurement Unit - Đơn vị Đo lường Quán tính) có thể "tự động tính toán" bằng con quay hồi chuyển, gia tốc kế và từ kế bên trong. Tuy nhiên, độ chính xác của chúng sẽ bị lệch theo thời gian nếu không có tham chiếu vị trí bên ngoài tuyệt đối. Công nghệ hợp nhất cảm biến kết hợp những điểm mạnh và điểm yếu của hệ thống GNSS và IMU, đồng thời giảm thiểu chúng. Tàu ngầm sử dụng IMU để định vị dưới nước. Dữ liệu GNSS sẽ hiệu chỉnh độ lệch cảm biến IMU khi bầu trời hiện ra.
Bản địa hóa và lập bản đồ
Công nghệ định vị và lập bản đồ ước tính vị trí và hướng của vật thể. Kỹ thuật SLAM (Định vị và Lập bản đồ Đồng thời) được sử dụng trong các ứng dụng kết hợp cảm biến, đặc biệt là trong robot và xe tự hành, để xây dựng bản đồ môi trường xung quanh với nền tảng cảm biến được định vị bên trong.
Đo góc nhìn trực quan (Visual Odometry) là một kỹ thuật thị giác máy tính ước tính chuyển động của xe bằng cách phân tích hình ảnh camera. Việc theo dõi các đặc điểm giữa các khung hình sẽ tính toán vị trí và hướng tương đối của xe mà không cần cảm biến bên ngoài. Đo góc nhìn trực quan ước tính chuyển động tự thân của cảm biến (ví dụ: chuyển động so với môi trường) theo cách này. Visual SLAM mở rộng khái niệm này để tính toán quỹ đạo của cảm biến và đồng thời lập bản đồ môi trường.
Tích hợp và giao tiếp
Việc tích hợp dữ liệu cảm biến thường liên quan đến định dạng dữ liệu, giao thức và đồng bộ hóa thời gian. Việc tích hợp dữ liệu cảm biến không đồng nhất và đảm bảo giao tiếp liền mạch giữa các cảm biến và bộ xử lý là rất quan trọng. Những yếu tố này bao gồm các giao thức truyền thông được chuẩn hóa (ví dụ: bus CAN, Ethernet), phần mềm trung gian để tích hợp dữ liệu và các phương pháp đồng bộ hóa dữ liệu.
Kỹ thuật xử lý tín hiệu
Các thuật toán xử lý tín hiệu xử lý trước, lọc và trích xuất thông tin hữu ích từ dữ liệu thô. Điều này bao gồm giảm nhiễu, trích xuất đặc trưng và chuẩn hóa dữ liệu. Các thuật toán này đóng vai trò quan trọng trong việc chuẩn bị dữ liệu cảm biến cho quá trình tổng hợp.
- Lọc Kalman: Lọc Kalman là thuật toán đệ quy được sử dụng để ước tính trạng thái của một hệ thống động bằng cách tích hợp các phép đo cảm biến nhiễu với một mô hình dự đoán.
- Suy luận Bayes: Suy luận Bayes là một khuôn khổ thống kê để cập nhật niềm tin về trạng thái của một hệ thống dựa trên kiến thức trước đó và bằng chứng quan sát được, thường được sử dụng trong lý luận xác suất.
- Phân tích Wavelet: Phân tích Wavelet là một công cụ toán học để phân tích tín hiệu thành các thành phần tần số khác nhau. Nó hữu ích cho việc trích xuất đặc trưng và khử nhiễu trong dữ liệu cảm biến.
- Biến đổi Fourier: Biến đổi Fourier là kỹ thuật toán học phân tích tín hiệu thành các thành phần tần số, cho phép phân tích các hiện tượng tuần hoàn và không tuần hoàn.
- Mô hình Markov ẩn: HMM là mô hình xác suất được sử dụng để biểu diễn chuỗi quan sát. Chúng đặc biệt hữu ích cho dữ liệu chuỗi thời gian.
- Mạng nơ-ron: Mạng nơ-ron là các mô hình học máy lấy cảm hứng từ cấu trúc não người. Chúng có thể phát hiện và học các mối quan hệ phức tạp, đồng thời thực hiện các nhiệm vụ như phân loại và hồi quy. Các loại mạng nơ-ron thường được sử dụng nhất trong các ứng dụng hợp nhất cảm biến là Mạng nơ-ron tích chập (Convolutional Neural Networks), Mạng nơ-ron hồi quy (Recurrent Neural Networks), Mạng nơ-ron đồ thị (Graph Neural Networks), Mạng niềm tin sâu (Deep Belief Networks) và Bộ mã hóa tự động (Autoencoders).
- Lọc đồng thuận: Lọc đồng thuận liên quan đến việc tinh chỉnh ước tính theo từng bước bằng cách đạt được sự đồng thuận giữa nhiều cảm biến. Mỗi cảm biến hoặc tác nhân đưa ra ước tính của mình, sau đó được so sánh và kết hợp với ước tính từ các cảm biến hoặc tác nhân khác. Các giá trị ngoại lệ sẽ bị loại bỏ, trong khi các ước tính nhất quán hơn sẽ được đánh giá cao hơn. Quy trình lặp lại này giúp cải thiện kết quả hệ thống.
Ứng dụng hợp nhất cảm biến
Ứng dụng của công nghệ kết hợp cảm biến trải dài từ hình ảnh y tế đến robot và từ xe tự lái đến hệ thống điều khiển và tự động hóa công nghiệp.
- Hệ thống thu thập dữ liệu
- Xe tự lái
- Máy bay không người lái
- Điều hướng trong nhà
- Tự động hóa công nghiệp và kiểm soát quy trình
- Chụp ảnh y tế
- Mạng lưới nơ-ron
- Kỹ thuật robot
- Chăm sóc sức khỏe
- Thực tế tăng cường và thực tế ảo
- Quốc phòng và An ninh
Những thách thức về hợp nhất cảm biến
Việc sử dụng hợp nhất cảm biến hiệu quả đòi hỏi nhiều hơn là chỉ kết hợp cảm biến, thuật toán và xử lý tín hiệu. Việc áp dụng kiến thức chuyên sâu về lĩnh vực cụ thể vào hợp nhất cảm biến là chìa khóa để đạt được kết quả tối ưu từ hợp nhất cảm biến. Một số thách thức khác bao gồm:
Tính không đồng nhất của dữ liệu
Cảm biến rất đa dạng, và dữ liệu có thể khác nhau đáng kể về định dạng, độ chính xác, độ tin cậy và tốc độ lấy mẫu. Việc tích hợp dữ liệu từ các loại cảm biến khác nhau (ví dụ: camera, LiDAR, RADAR) với các đặc điểm đa dạng có thể là một thách thức. Việc đảm bảo tính nhất quán và khả năng tương thích giữa các nguồn dữ liệu không đồng nhất là điều cần thiết để hợp nhất dữ liệu cảm biến không đồng nhất.
Tiếng ồn và sự không chắc chắn
Cảm biến dễ bị nhiễu, sai số và bất định do các yếu tố môi trường, hạn chế về phần cứng hoặc đặc tính vốn có của cảm biến. Việc xử lý và giảm thiểu những bất định này là rất quan trọng để tạo ra kết quả đầu ra hợp nhất đáng tin cậy và chính xác. Độ chính xác của hợp nhất cảm biến phụ thuộc vào các kỹ thuật như lọc Kalman, suy luận Bayes và mô hình xác suất để giải quyết nhiễu và bất định.
Độ phức tạp tính toán
Hợp nhất cảm biến thường liên quan đến các thuật toán toán học phức tạp và quy trình tính toán, đặc biệt là trong các ứng dụng thời gian thực đòi hỏi xử lý dữ liệu nhanh. Khi số lượng cảm biến tăng lên hoặc độ phức tạp của thuật toán hợp nhất tăng lên, nhu cầu tính toán cũng tăng theo. Việc cân bằng giữa nhu cầu về kết quả hợp nhất chính xác với hiệu quả tính toán là một thách thức đáng kể, đặc biệt là trong các môi trường hạn chế về tài nguyên như hệ thống nhúng hoặc nền tảng di động.
Xu hướng hợp nhất cảm biến chính
Khi ngày càng nhiều hệ thống có khả năng tự động hóa, những tiến bộ trong công nghệ kết hợp cảm biến sẽ tiếp tục được cải thiện.
Hợp nhất xuyên miền
Hợp nhất liên miền là một trong những khả năng thú vị nhất. Dữ liệu cảm biến từ các miền khác nhau, chẳng hạn như thiết bị IoT, mạng xã hội và cơ sở dữ liệu công cộng, có thể được tích hợp để cung cấp hiểu biết toàn diện hơn về các hệ thống và hiện tượng phức tạp.
Tận dụng điện toán lượng tử
Các kỹ sư có thể tận dụng những tiến bộ trong điện toán lượng tử để nâng cao tốc độ và khả năng của hợp nhất cảm biến. Tốc độ là yếu tố thiết yếu trong các ứng dụng thời gian thực như xe tự hành trên bộ, trên biển và trên không, vốn rất quan trọng đối với sự an toàn của con người. Hợp nhất cảm biến thời gian thực đang là một yêu cầu ngày càng tăng.
Tận dụng trí tuệ nhân tạo
Việc tích hợp các thuật toán AI và máy học tiên tiến sẽ cho phép các hệ thống kết hợp cảm biến thông minh và thích ứng hơn có thể học hỏi từ dữ liệu và liên tục cải thiện.
Bảo vệ quyền riêng tư
Tất cả những công nghệ mạnh mẽ này có thể xâm phạm quyền riêng tư cá nhân. Ngành công nghiệp phải đảm bảo rằng công nghệ tổng hợp cảm biến tiếp tục phát triển mà không làm ảnh hưởng đến quyền riêng tư.
Phần kết luận
Bằng cách tích hợp dữ liệu từ nhiều cảm biến và áp dụng các thuật toán xử lý tín hiệu tiên tiến, công nghệ hợp nhất cảm biến giúp máy móc tiên tiến nhận biết và diễn giải môi trường xung quanh với độ phức tạp và chính xác như con người.
Những thách thức vẫn còn đó, từ việc quản lý tính không đồng nhất của dữ liệu cảm biến đến việc giảm thiểu nhiễu và xử lý sự phức tạp của tính toán. Khi công nghệ hợp nhất cảm biến tiếp tục phát triển, được thúc đẩy bởi những tiến bộ trong công nghệ cảm biến, kỹ thuật xử lý tín hiệu, kiến trúc hợp nhất dữ liệu và trí tuệ nhân tạo, nó hứa hẹn sẽ mở ra những khả năng chưa từng có về tính tự chủ, trí tuệ và tích hợp liên miền.
Công nghệ kết hợp cảm biến đang chuẩn bị cách mạng hóa cách chúng ta tương tác và hiểu thế giới xung quanh, mở ra kỷ nguyên mới về đổi mới và khả năng trong nhiều ngành công nghiệp khác nhau.
