



Máy trạng thái hữu hạn (FSM) là gì? Ý nghĩa, cách thức hoạt động và ví dụ
Bài viết này giải thích về FSM, cách thức hoạt động và một số ví dụ chính.
Máy trạng thái hữu hạn là gì?
Máy trạng thái hữu hạn (FSM) là một mô hình toán học được sử dụng để biểu diễn và điều khiển hành vi của một hệ thống có thể tồn tại ở một số trạng thái hữu hạn tại bất kỳ thời điểm nào. FSM là một khái niệm được sử dụng rộng rãi trong khoa học máy tính, kỹ thuật và các lĩnh vực khác để thiết kế, phân tích và triển khai các hệ thống hoạt động rời rạc và liên tục.
Về cơ bản, FSM bao gồm một tập hợp các trạng thái, một tập hợp các sự kiện hoặc kích thích đầu vào, một tập hợp các hành động hoặc phản hồi đầu ra và một tập hợp các chuyển đổi giữa các trạng thái dựa trên các sự kiện đầu vào, có thể được biểu diễn dưới dạng đồ thị có hướng, trong đó các nút biểu diễn các trạng thái và các cạnh nối các nút biểu diễn các chuyển đổi.
Chúng ta hãy cùng xem FSM là gì theo cách đơn giản.
Hãy tưởng tượng bạn có một robot có thể thực hiện nhiều nhiệm vụ khác nhau. Robot có thể ở một trong số các trạng thái giới hạn, chẳng hạn như "nhàn rỗi", "di chuyển" hoặc "dọn dẹp". Những trạng thái này đại diện cho trạng thái hiện tại của robot hoặc những gì nó đang làm.
Bây giờ, giả sử robot nhận được lệnh hoặc sự kiện, chẳng hạn như nhấn nút hoặc phát hiện chướng ngại vật. Những lệnh hoặc sự kiện này có thể khiến robot thay đổi trạng thái và thực hiện hành động.
FSM giống như một bản thiết kế hoặc một bộ quy tắc giúp robot quyết định phải làm gì ở mỗi trạng thái và cách chuyển đổi từ trạng thái này sang trạng thái khác dựa trên các lệnh hoặc sự kiện mà nó nhận được. Nó giống như một cơ chế ra quyết định cho robot.
Ví dụ, nếu một robot đang ở trạng thái "nhàn rỗi" và được lệnh bắt đầu vệ sinh, FSM sẽ ra lệnh cho robot chuyển sang trạng thái "vệ sinh" và bắt đầu vệ sinh. Tương tự, nếu một robot đang ở trạng thái "di chuyển" và phát hiện chướng ngại vật, FSM sẽ ra lệnh cho robot chuyển sang trạng thái "tránh" và thay đổi đường đi để tránh chướng ngại vật.
Tóm lại, FSM giúp kiểm soát hành vi của hệ thống hoặc robot bằng cách xác định các trạng thái khác nhau, các hành động có thể thực hiện trong mỗi trạng thái và cách chuyển đổi giữa các trạng thái dựa trên các lệnh hoặc sự kiện nhận được. FSM giống như một cẩm nang hướng dẫn quá trình ra quyết định của hệ thống và giúp hệ thống phản ứng phù hợp với các tình huống khác nhau.
FSM được sử dụng rộng rãi để mô hình hóa và điều khiển các hệ thống có hành vi rời rạc và liên tục, chẳng hạn như giao thức phần mềm, mạch kỹ thuật số, hệ thống robot và giao diện người dùng. FSM cung cấp một phương pháp tiếp cận có cấu trúc và hệ thống để thiết kế và phân tích các hệ thống phức tạp, giúp chúng dễ hiểu, triển khai và bảo trì hơn.
Các loại FSM
FSM được sử dụng rộng rãi trong nhiều lĩnh vực như điện tử, robot, mạng và viễn thông, cũng như các ứng dụng hàng ngày. Các loại FSM phổ biến bao gồm:
1. Máy trạng thái hữu hạn xác định (DFSM)
Trong FSM xác định, mỗi quá trình chuyển đổi trạng thái được xác định cụ thể bởi trạng thái hiện tại và đầu vào của nó, nghĩa là với một đầu vào và trạng thái hiện tại cụ thể, quá trình chuyển đổi sang trạng thái tiếp theo chỉ có thể xảy ra một lần.
Ví dụ: Máy bán hàng tự động
Hãy xem xét một máy bán hàng tự động có ba trạng thái: Có sẵn, Đã chọn và Đã phân phối. Việc chuyển đổi giữa các trạng thái này phụ thuộc vào thông tin đầu vào của người dùng và trạng thái hiện tại. Ví dụ: nếu trạng thái hiện tại là "Có sẵn" và người dùng chọn một sản phẩm, máy sẽ chuyển sang trạng thái "Đã chọn". Nếu người dùng xác nhận lựa chọn, máy sẽ chuyển sang trạng thái "Đã phân phối" và phân phối sản phẩm đã chọn. Ví dụ này minh họa một FSM xác định, vì với mỗi đầu vào và trạng thái, có một trạng thái tiếp theo duy nhất.
2. Máy trạng thái hữu hạn không xác định (NDFSM)
FSM không xác định cho phép nhiều lần chuyển đổi cho một trạng thái đầu vào và hiện tại nhất định, nghĩa là trạng thái tiếp theo không được xác định cụ thể và máy có thể ở nhiều trạng thái cùng một lúc.
Ví dụ: Hệ thống thang máy
Hãy xem xét một hệ thống thang máy có bốn tầng: tầng 1, tầng 2 và tầng 3. Khi người dùng nhấn nút bên trong thang máy, có thể đến được tầng mong muốn theo nhiều cách. Ví dụ: nếu trạng thái hiện tại là tầng 3 và người dùng nhấn nút cho tầng 3, thang máy có thể đi theo nhiều đường khác nhau, chẳng hạn như dừng ở tầng 1, rồi tầng 2, trước khi cuối cùng đến tầng 3. Ví dụ này minh họa một FSM không ổn định, vì có nhiều đường đi khả thi cho cùng một đầu vào và trạng thái.
3. Máy làm bột
Máy Mealy là một FSM không chỉ xác định trạng thái và các thay đổi của nó mà còn liên kết đầu ra với mỗi thay đổi. Đầu ra của loại máy này phụ thuộc vào cả trạng thái hiện tại và đầu vào.
Ví dụ: Hệ thống cửa quay hoạt động bằng xu
Hãy xem xét một hệ thống cửa xoay vận hành bằng tiền xu. Cửa xoay có hai trạng thái: 'khóa' và 'mở'. Khi một đồng xu được đưa vào (đầu vào) trong trạng thái 'khóa', hệ thống sẽ chuyển sang trạng thái 'mở' và gửi tín hiệu cho phép người đó đi qua (đầu ra). Ngược lại, nếu ai đó cố gắng đi qua mà không đưa đồng xu vào (đầu vào) trong khi ở trạng thái 'khóa', hệ thống vẫn giữ nguyên trạng thái này và gửi tín hiệu cho biết quyền truy cập bị từ chối (đầu ra). Trong ví dụ này, tín hiệu đầu ra (tín hiệu cho phép hoặc từ chối truy cập) phụ thuộc vào cả trạng thái hiện tại và đầu vào, thể hiện hoạt động của máy Mealy.
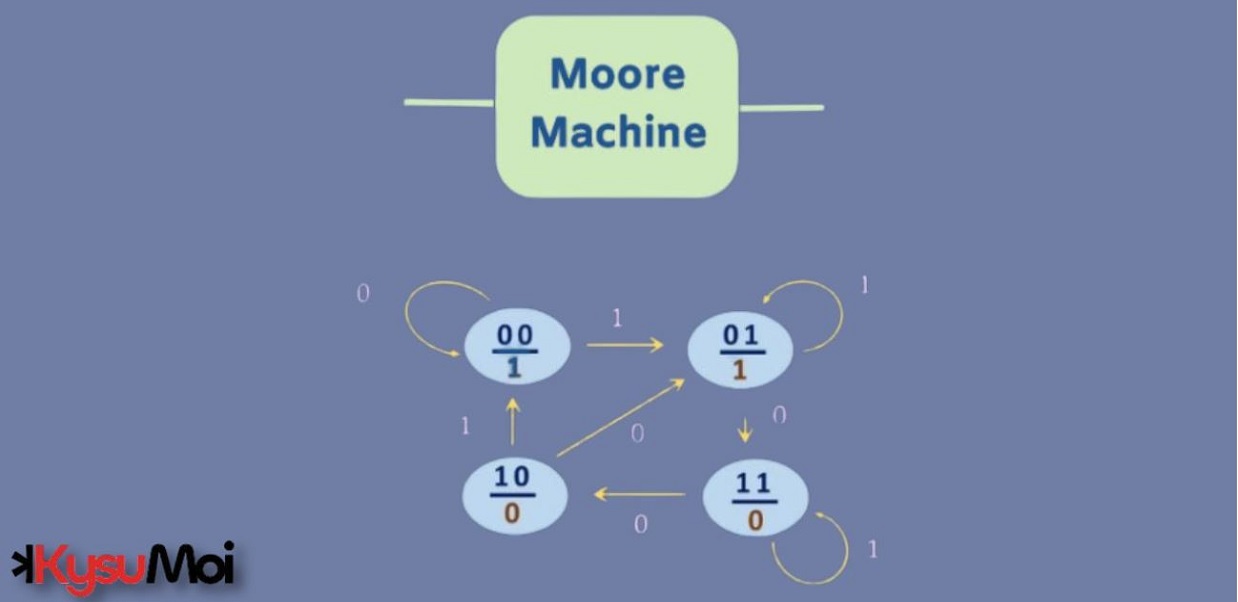
4. Máy Moore
Máy Moore là một loại FSM trong đó đầu ra chỉ phụ thuộc vào trạng thái hiện tại. Điều này có nghĩa là bất kể đầu vào là gì, đầu ra vẫn được xác định bởi trạng thái của máy. Các chuyển đổi giữa các trạng thái được kích hoạt bởi đầu vào, nhưng đầu ra lại gắn liền với chính các trạng thái đó.
Ví dụ: Hệ thống chuông cửa
Hệ thống chuông cửa có hai trạng thái: "rảnh" và "chuông". Khi ai đó nhấn nút chuông cửa (đầu vào), hệ thống sẽ chuyển từ trạng thái "rảnh" sang trạng thái "chuông". Ở trạng thái "chuông", hệ thống sẽ liên tục rung chuông (đầu ra) cho đến khi nút được thả ra. Khi nút được thả ra, hệ thống sẽ trở về trạng thái "rảnh". Trong ví dụ này, đầu ra (chuông) chỉ phụ thuộc vào trạng thái hiện tại, bất kể đầu vào là gì, thể hiện hoạt động của máy Moore.
Máy trạng thái hữu hạn hoạt động như thế nào?
Máy trạng thái hữu hạn cung cấp một phương pháp có hệ thống để điều khiển và thao tác các hệ thống với hành vi rời rạc và tuần tự. FSM cho phép thiết kế và phân tích các hệ thống phức tạp một cách rõ ràng và có cấu trúc, giúp chúng dễ hiểu và triển khai hơn bằng cách xác định trạng thái, chuyển đổi và các phép toán đầu ra.
Chúng ta hãy xem xét kỹ hơn các bước hoạt động của FSM.
1. Đặt trạng thái
Xác định các trạng thái khác nhau mà hệ thống của bạn có thể đang ở. Mỗi trạng thái đại diện cho một điều kiện hoặc chế độ cụ thể của hệ thống. Ví dụ, trong máy giặt, bạn có thể có các trạng thái như "chờ", "bắt đầu giặt", "xả" và "vắt".
2. Thay đổi lịch trình
Xác định các điều kiện mà hệ thống của bạn sẽ chuyển đổi từ trạng thái này sang trạng thái khác. Các điều kiện này thường được kích hoạt bởi các sự kiện đầu vào hoặc trình kích hoạt. Ví dụ: trong máy bán hàng tự động, quá trình chuyển đổi từ "nhàn rỗi" sang "đã chọn" có thể xảy ra khi người dùng nhấn nút.
3. Tạo bảng hoặc sơ đồ chuyển đổi trạng thái.
Hiển thị trạng thái, sự kiện đầu vào và chuyển đổi dưới dạng bảng hoặc sơ đồ, giúp trực quan hóa và sắp xếp hành vi của FSM. Thông thường, một bảng chuyển đổi trạng thái bao gồm một hàng cho trạng thái hiện tại, một cột cho sự kiện đầu vào và một ô cho biết trạng thái hoặc hành động tiếp theo.
4. Khởi động FSM
Khởi tạo FSM ở trạng thái mặc định, tức là 'nhàn rỗi'. Đây là điểm khởi đầu của hệ thống.
5. Xử lý các sự kiện đầu vào
Nhận một sự kiện đầu vào hoặc kích hoạt. Sự kiện này kích hoạt một thay đổi trạng thái có thể xảy ra trong FSM. Ví dụ: nếu người dùng chọn một sản phẩm trong máy bán hàng tự động, sự kiện đó sẽ trở thành một đầu vào.
6. Kiểm tra trạng thái hiện tại và các sự kiện đầu vào.
Xác định trạng thái hiện tại của FSM và các sự kiện đầu vào đã nhận. Thông tin này được sử dụng để quyết định trạng thái hoặc hành động tiếp theo.
7. Tìm kiếm thay đổi
Tham khảo bảng hoặc sơ đồ chuyển đổi trạng thái để tìm trạng thái chuyển đổi phù hợp dựa trên trạng thái hiện tại và các sự kiện đầu vào. Bảng này xác định trạng thái hoặc hành động tiếp theo liên quan đến sự kết hợp giữa trạng thái hiện tại và các sự kiện đầu vào.
8. Thực hiện thay đổi
Thực hiện bất kỳ hành động hoặc thay đổi cần thiết nào liên quan đến thay đổi đã chỉ định, có thể bao gồm cập nhật các biến nội bộ, sửa đổi đầu ra hoặc kích hoạt các sự kiện bên ngoài. Trong ví dụ về máy bán hàng tự động, nếu trạng thái hiện tại là "nhàn rỗi" và sự kiện đầu vào là lựa chọn sản phẩm, FSM sẽ chuyển sang trạng thái "đã chọn" và chuẩn bị phân phối.
9. Cập nhật trạng thái hiện tại
Đặt trạng thái hiện tại của FSM thành trạng thái tiếp theo được xác định bởi quá trình chuyển đổi. Hành động này chuẩn bị FSM cho sự kiện đầu vào tiếp theo.
10. Lặp lại
Tiếp tục bằng cách xử lý các sự kiện đầu vào bổ sung và lặp lại các bước từ năm đến chín cho đến khi hệ thống đạt đến trạng thái cuối cùng hoặc cho đến khi đạt được hành vi mong muốn.
Bằng cách tuân theo quy trình từng bước này, FSM có thể kiểm soát hiệu quả hành vi của hệ thống dựa trên trạng thái hiện tại và các sự kiện đầu vào nhận được. Những thay đổi và hành động của FSM cho phép hệ thống phản ứng phù hợp với các điều kiện và kích thích khác nhau.
Ví dụ về máy trạng thái hữu hạn
Máy trạng thái hữu hạn được sử dụng trong nhiều ứng dụng hàng ngày. Mặc dù bạn có thể không tương tác trực tiếp với FSM, chúng được sử dụng ngầm để điều khiển và quản lý hệ thống và quy trình.
Ví dụ về các hệ thống có thể được mô hình hóa bằng FSM bao gồm:
1. Bộ điều khiển đèn giao thông
Bộ điều khiển đèn giao thông có thể được mô hình hóa bằng FSM với các trạng thái như "xanh lá cây", "vàng" và "đỏ". Các thay đổi diễn ra dựa trên khoảng thời gian hoặc số lượng phương tiện di chuyển. Các sự kiện đầu vào có thể bao gồm bộ hẹn giờ, bộ phát hiện phương tiện và nút bấm dành cho người đi bộ. Các hành động đầu ra bao gồm việc chuyển đổi đèn cho phù hợp.
2. Hệ thống điều khiển thang máy
Hệ thống điều khiển thang máy có thể được biểu diễn bằng FSM (Hệ thống điều khiển thang máy), với các trạng thái khác nhau như "nhàn rỗi", "di chuyển lên", "di chuyển xuống" và "dừng". Trạng thái thay đổi khi người dùng nhấn nút tầng hoặc khi thang máy đến đích. FSM đảm bảo thang máy di chuyển đến tầng mong muốn và mở/đóng cửa đúng thời điểm.
3. Xử lý sự kiện GUI
Trong giao diện người dùng đồ họa, trình xử lý sự kiện chuột có thể được triển khai bằng FSM. Các trạng thái có thể bao gồm 'nhàn rỗi', 'kéo' và 'nhấp'. Chuyển tiếp xảy ra khi nhấn hoặc thả nút chuột. Các hành động đầu ra có thể bao gồm di chuyển đối tượng, làm nổi bật các thành phần hoặc khởi tạo các hành động dựa trên sự kiện chuột.
4. Giao thức mạng
Giao thức kết nối TCP có thể được mô hình hóa bằng FSM. Các trạng thái có thể bao gồm 'đóng', 'lắng nghe', 'gửi SYN', 'nhận SYN', 'tạo', v.v. Các chuyển tiếp diễn ra dựa trên các cờ TCP được trao đổi giữa các thực thể giao tiếp. Các thao tác đầu ra bao gồm thiết lập, duy trì và chấm dứt kết nối mạng. Tương tự, các giao thức như HTTP và DNS sử dụng FSM để quản lý việc thiết lập kết nối, truyền dữ liệu, xử lý lỗi, định tuyến mạng và chấm dứt phù hợp.
5. Xử lý ngôn ngữ tự nhiên
FSM được sử dụng trong xử lý ngôn ngữ tự nhiên (NLP) cho các tác vụ như phân tích cú pháp văn bản, phân tích cú pháp và hiểu ngôn ngữ. FSM được sử dụng để xác định các quy tắc ngữ pháp, cấu trúc cú pháp và các mẫu ngữ nghĩa, cho phép nhận dạng và phân tích các yếu tố ngôn ngữ trong văn bản bằng cách mô hình hóa các trạng thái và chuyển đổi dựa trên các quy tắc ngôn ngữ. FSM giúp xử lý và diễn giải đầu vào ngôn ngữ tự nhiên, cho phép thực hiện các tác vụ như trích xuất thông tin, phân tích cảm xúc và trả lời câu hỏi trong các ứng dụng NLP.
6. Hệ thống tự động hóa nhà
Với sự phát triển của IoT và tự động hóa nhà ở, FSM đang được sử dụng trong các hệ thống nhà thông minh để điều khiển các thiết bị như đèn, bộ điều nhiệt, hệ thống an ninh và thiết bị gia dụng. FSM cho phép tích hợp và phối hợp liền mạch các thiết bị này, cho phép người dùng tự động hóa các tác vụ, tùy chỉnh cài đặt và cải thiện an toàn cũng như hiệu quả năng lượng trong nhà.
7. Robot và hệ thống tự động hóa
Robot chức năng (FSM) đóng vai trò quan trọng trong việc điều khiển hành vi của robot và hệ thống tự động hóa. Các mô hình này giúp điều khiển các hành động như định hướng, tránh chướng ngại vật và thực hiện nhiệm vụ dựa trên dữ liệu đầu vào từ cảm biến và các quy tắc được xác định trước. Vì lý do này, FSM được sử dụng rộng rãi trong sản xuất và tự động hóa quy trình công nghiệp, nhờ khả năng kiểm soát và điều phối các quy trình làm việc phức tạp, dây chuyền sản xuất và hệ thống robot. FSM cho phép phân bổ nguồn lực, phối hợp quy trình và phát hiện lỗi hiệu quả, từ đó nâng cao hiệu quả hoạt động và năng suất.
8. Chatbot và trợ lý ảo
FSM được sử dụng rộng rãi trong chatbot và trợ lý ảo để quản lý luồng hội thoại và tương tác với người dùng. Bằng cách mô hình hóa các trạng thái hội thoại khác nhau, chẳng hạn như chào hỏi, thu thập thông tin và trả lời, FSM giúp chatbot hiểu và phản hồi phù hợp dựa trên thông tin đầu vào của người dùng. FSM giúp theo dõi trạng thái hiện tại, xác định trạng thái tiếp theo dựa trên câu hỏi của người dùng và kích hoạt các hành động hoặc phản hồi liên quan, cho phép các cuộc trò chuyện tự nhiên và hấp dẫn hơn với người dùng.
9. Thiết kế trình biên dịch
FSM được sử dụng rộng rãi trong thiết kế trình biên dịch để phân tích từ vựng, bao gồm việc quét mã nguồn và xác định từng token riêng lẻ. Các phương pháp tiếp cận dựa trên FSM cho phép nhận dạng hiệu quả các mẫu token bằng cách chuyển đổi giữa các trạng thái dựa trên các ký tự đầu vào. Bằng cách mô hình hóa các quy tắc từ vựng của ngôn ngữ lập trình dưới dạng trạng thái và chuyển đổi, FSM cho phép trích xuất token một cách có hệ thống và chính xác, tạo cơ sở cho bước tiếp theo của trình biên dịch trong việc phân tích và tạo mã thực thi.
10. Phát triển trò chơi
FSM cũng được sử dụng trong phát triển trò chơi để điều khiển hành vi và tương tác của nhân vật. Bằng cách thể hiện các trạng thái như "nghỉ ngơi", "đi bộ", "tấn công" và "nhảy", đồng thời xác định các chuyển đổi giữa các trạng thái này dựa trên các sự kiện trong trò chơi, thông tin đầu vào của người chơi hoặc quyết định của AI, FSM cho phép nhân vật hành xử linh hoạt và nhạy bén. FSM hỗ trợ việc phối hợp hoạt ảnh, chuyển động và hành động, mang đến lối chơi hấp dẫn với các hành vi nhân vật thông minh và nhạy bén theo ngữ cảnh.
Những ví dụ này minh họa tính linh hoạt của FSM trong việc mô hình hóa và điều khiển các hệ thống có hành vi rời rạc và liên tục. Máy trạng thái hữu hạn cung cấp một phương pháp tiếp cận có cấu trúc để thiết kế các hệ thống phức tạp và cho phép hiểu và triển khai hiệu quả hành vi của hệ thống.
Phần kết luận
Khi công nghệ tiếp tục phát triển, tương lai của máy trạng thái hữu hạn (FSM) sẽ phát triển song hành cùng các lĩnh vực mới nổi như AI, ML và IoT. Máy trạng thái hữu hạn sẽ được kết hợp với các thuật toán AI và ML để tạo ra các hệ thống thông minh và thích ứng hơn. Sự kết hợp này sẽ cho phép FSM tự động học hỏi và điều chỉnh trạng thái, thay đổi và hành động dựa trên dữ liệu thời gian thực và các mô hình phức tạp, mang lại khả năng ra quyết định tinh vi và phù hợp với ngữ cảnh hơn.
Hơn nữa, với việc áp dụng rộng rãi các thiết bị IoT, FSM đóng vai trò quan trọng trong việc phối hợp và kiểm soát các hệ thống được kết nối, tối ưu hóa việc phân bổ tài nguyên và cho phép tương tác liền mạch giữa các thiết bị và dịch vụ. Tương lai của FSM nằm ở việc tích hợp với các công nghệ tiên tiến, cho phép chúng cung cấp năng lượng cho các hệ thống thông minh, tự động và kết nối trên nhiều lĩnh vực.
