



Xây dựng hệ thống thị giác robot hiệu suất cao với GMSL
Khai thác tối đa tốc độ xử lý hình ảnh robot vượt trội bằng cách làm chủ kết nối GMSL trong thiết kế tiếp theo của bạn.
Tóm tắt
Các hệ thống robot ngày càng dựa vào thị giác để nhận biết và tương tác với môi trường xung quanh, tạo ra nhu cầu ngày càng tăng đối với các liên kết dữ liệu tốc độ cao, độ trễ thấp. Giao thức liên kết đa phương tiện Gigabit (GMSL ™) cung cấp một giải pháp đầy hứa hẹn bằng cách truyền tín hiệu video, tín hiệu điều khiển và nguồn điện qua một cáp duy nhất, có độ tin cậy cao. Bài viết này xem xét cách thức camera được sử dụng trong robot, những thách thức về kết nối mà chúng phải đối mặt và cách GMSL có thể giúp tạo ra các nền tảng robot có khả năng mở rộng, mạnh mẽ và hiệu suất cao.
Giới thiệu
Các hệ thống robot ngày càng dựa vào thị giác máy tính tiên tiến để nhận biết, điều hướng và tương tác với môi trường xung quanh. Nhu cầu về các liên kết tốc độ cao, độ trễ thấp có khả năng truyền và thu thập dữ liệu video thời gian thực chưa bao giờ lớn đến thế.
Giao diện liên kết đa phương tiện Gigabit (GMSL™), ban đầu được phát triển cho các ứng dụng ô tô, đang trở thành một giải pháp mạnh mẽ và hiệu quả cho các hệ thống robot. GMSL truyền dữ liệu video tốc độ cao, tín hiệu điều khiển hai chiều và nguồn điện qua một cáp duy nhất, cho phép sử dụng cáp dài, độ trễ micro giây có thể cấu hình và tỷ lệ lỗi bit (BER) cực thấp, giúp đơn giản hóa hệ thống dây dẫn và giảm kích thước tổng thể của giải pháp. Nó lý tưởng cho các robot đòi hỏi khả năng xử lý hình ảnh cao hoạt động trong môi trường năng động và thường khắc nghiệt.
Các phần tiếp theo sẽ thảo luận về việc camera được sử dụng ở đâu và như thế nào trong lĩnh vực robot, những thách thức về dữ liệu và kết nối mà các ứng dụng này phải đối mặt, và cách GMSL có thể giúp các nhà thiết kế hệ thống xây dựng các nền tảng robot có khả năng mở rộng, đáng tin cậy và hiệu suất cao.
Máy ảnh được sử dụng ở đâu trong lĩnh vực robot?
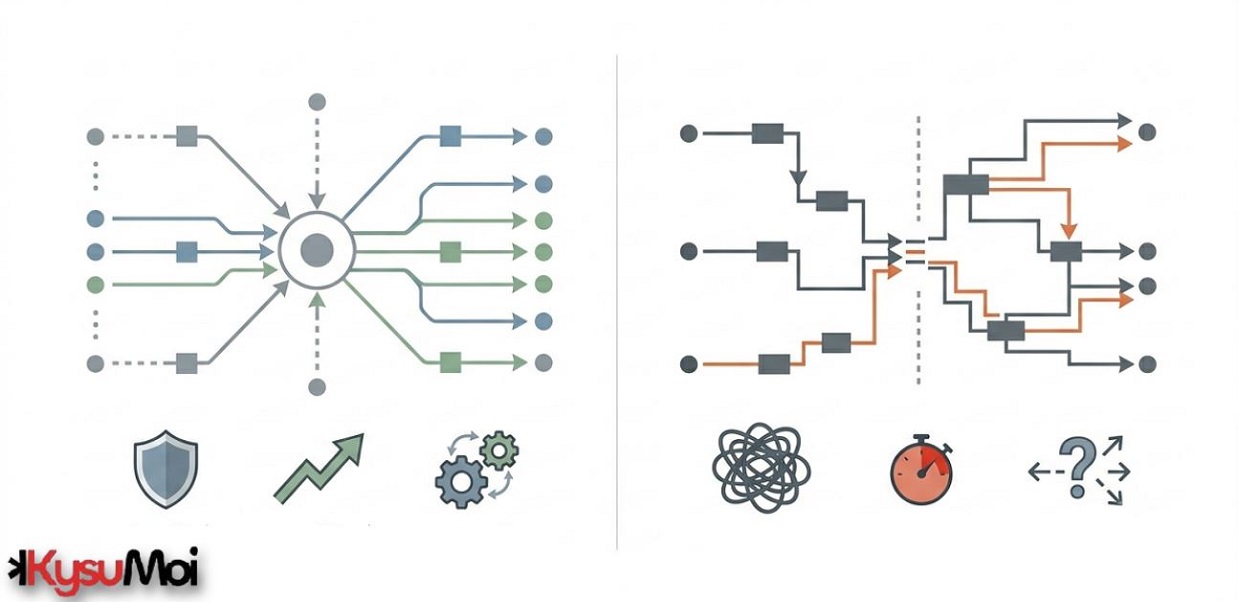
Camera đóng vai trò trung tâm trong khả năng nhận thức của robot hiện đại, cho phép máy móc hiểu và phản ứng với môi trường xung quanh trong thời gian thực. Cho dù đó là robot trong kho di chuyển giữa các lối đi, cánh tay robot phân loại bưu kiện hay robot dịch vụ tương tác với con người, hệ thống thị giác đều rất quan trọng đối với hoạt động tự động, tự động hóa và tương tác. Những camera này không chỉ đa dạng về chức năng mà còn về hình thức, được gắn trên các bộ phận khác nhau của robot tùy thuộc vào nhiệm vụ và được điều chỉnh phù hợp với các hạn chế về vật lý và hoạt động của nền tảng (xem Hình 1).

Tự chủ
Trong robot tự hành, camera đóng vai trò như đôi mắt của máy móc, cho phép chúng nhận biết môi trường xung quanh, tránh chướng ngại vật và di chuyển trong không gian làm việc. Đối với các robot di động như robot giao hàng, xe vận chuyển trong kho hoặc xe khảo sát nông nghiệp, điều này thường bao gồm sự kết hợp của các camera góc rộng được đặt ở các góc hoặc cạnh của robot. Các hệ thống quan sát toàn hướng này cung cấp khả năng nhận biết 360°, cho phép robot di chuyển trong các khu vực phức tạp mà không va chạm.
Các ứng dụng tự hành khác sử dụng camera hướng lên hoặc xuống để đọc các điểm đánh dấu trên sàn, trần nhà hoặc tường. Những điểm đánh dấu này đóng vai trò là biển báo chỉ dẫn trực quan, cho phép robot định vị lại hoặc kích hoạt các hành động cụ thể khi di chuyển trong môi trường có cấu trúc như nhà máy hoặc bệnh viện. Trong các hệ thống tiên tiến hơn, camera lập thể hoặc camera đo khoảng cách (ToF) được đặt phía trước hoặc hai bên robot để tạo bản đồ ba chiều, ước tính khoảng cách và hỗ trợ dịch chuyển và lập bản đồ đồng thời (SLAM).
Vị trí lắp đặt các camera này thường được xác định bởi kích thước, khả năng di chuyển và phạm vi quan sát mong muốn của robot. Ví dụ, đối với các robot giao hàng nhỏ trên vỉa hè, camera có thể được giấu trong các tấm ốp lõm ở cả bốn phía. Trên máy bay không người lái, chúng thường hướng về phía trước để điều hướng và hướng xuống dưới để hạ cánh hoặc theo dõi vật thể.
Tự động hóa
Trong tự động hóa công nghiệp, hệ thống thị giác cho phép robot thực hiện các nhiệm vụ lặp đi lặp lại hoặc đòi hỏi độ chính xác cao với tốc độ và tính nhất quán. Ở đây, camera có thể được gắn trên cánh tay robot, bên cạnh bộ phận kẹp hoặc bộ phận cuối, và hệ thống có thể quan sát, định vị và thao tác các vật thể với độ chính xác cao. Điều này đặc biệt quan trọng trong các hoạt động gắp và đặt, nơi việc định vị và căn chỉnh chính xác các bộ phận hoặc kiện hàng là rất cần thiết.
Trong một số trường hợp, camera được gắn phía trên khu vực làm việc, trên giàn giáo hoặc đường ray trên cao, để kiểm tra các mặt hàng trên băng chuyền hoặc quét mã vạch. Trong môi trường kho hàng, robot di động sử dụng camera hướng về phía trước để phát hiện nhãn kệ, thẻ hoặc mã QR, cho phép phân công nhiệm vụ hoặc thay đổi lộ trình một cách linh hoạt.
Một số robot kiểm tra, đặc biệt là những robot được sử dụng trong cơ sở hạ tầng, tiện ích hoặc công nghiệp nặng, có camera có thể thu phóng được gắn trên cột hoặc cánh tay khớp nối. Điều này cho phép chúng chụp ảnh độ phân giải cao các mối hàn, máng cáp hoặc khớp nối ống – những công việc mà con người thực hiện thủ công có thể nguy hiểm hoặc tốn nhiều thời gian.
Tương tác giữa người với người
Camera cũng đóng vai trò quan trọng trong tương tác giữa người và robot trong sản xuất, chăm sóc sức khỏe và dịch vụ. Robot cần hiểu cử chỉ, nhận diện khuôn mặt và duy trì ý thức về bản sắc xã hội; hệ thống thị giác giúp điều này trở nên khả thi.
Robot hình người và robot dịch vụ thường có camera được gắn trên đầu hoặc ngực, mô phỏng tầm nhìn của con người để tương tác tự nhiên. Những camera này cho phép robot hiểu được biểu cảm khuôn mặt, giao tiếp bằng mắt hoặc theo dõi ánh nhìn của một người. Một số hệ thống sử dụng camera chiều sâu hoặc ống kính mắt cá để theo dõi chuyển động cơ thể hoặc phát hiện khi ai đó bước vào không gian làm việc chung.
Trong các kịch bản robot cộng tác (cobot) nơi con người và máy móc làm việc cạnh nhau, thị giác máy tính được sử dụng để đảm bảo an toàn và phản hồi. Robot có thể giám sát các bộ phận cơ thể hoặc công cụ đang đến gần, điều chỉnh hành vi của mình để tránh va chạm hoặc tạm dừng nếu ai đó đến quá gần.
Ngay cả trong các hệ thống điều khiển từ xa hoặc bán tự động, thị giác máy tính vẫn đóng vai trò then chốt. Camera gắn phía trước truyền video trực tiếp đến người vận hành từ xa, cho phép điều khiển hoặc giám sát theo thời gian thực. Các lớp phủ thực tế tăng cường có thể được thêm vào nguồn cấp video này để hỗ trợ các tác vụ như chẩn đoán từ xa hoặc đào tạo.
Trong các lĩnh vực này, vị trí đặt camera—cho dù trên bộ kẹp, gimbal, đế hay đầu robot—là một quyết định thiết kế liên quan đến chức năng, hình dạng và môi trường của robot. Khi các hệ thống robot trở nên có khả năng và tự chủ hơn, vai trò của thị giác trở nên quan trọng hơn, và việc tích hợp camera ngày càng trở nên phức tạp và cần thiết.
Những thách thức về mặt thị giác của robot.
Khi hệ thống thị giác trở thành xương sống của trí tuệ robot, thì cơ hội và độ phức tạp cũng tăng lên. Camera hiệu năng cao mở khóa những khả năng mạnh mẽ, cho phép nhận thức thời gian thực, thao tác chính xác và tương tác an toàn hơn với con người. Nhưng điều này cũng đòi hỏi kiến trúc hệ thống phức tạp hơn. Vấn đề không chỉ đơn thuần là xử lý nhanh chóng lượng lớn dữ liệu video. Nhiều robot hiện nay phải đưa ra quyết định trong tích tắc dựa trên nhiều tín hiệu đầu vào từ cảm biến, đồng thời hoạt động trong phạm vi cơ khí hạn chế và quản lý các ràng buộc về năng lượng.
Những thách thức này, cùng với môi trường mà robot phải đối mặt, bao gồm robot trong kho xử lý việc tiếp cận kho đông lạnh, chịu được sự thay đổi nhiệt độ đột ngột và hiện tượng ngưng tụ; xe khảo sát nông nghiệp di chuyển trên những cánh đồng chưa được trải nhựa, hấp thụ các rung động và va chạm cơ học liên tục; và robot dịch vụ trong bệnh viện hoặc khu vực công cộng gặp phải môi trường xa lạ và phức tạp về mặt hình ảnh, đòi hỏi chúng phải thích nghi nhanh chóng để di chuyển an toàn xung quanh người và chướng ngại vật.
Giải quyết các thách thức với GMSL.
GMSL có vị thế độc đáo để đáp ứng nhu cầu của các hệ thống robot hiện đại. Sự kết hợp giữa băng thông, độ bền và tính linh hoạt tích hợp khiến nó trở nên lý tưởng cho các nền tảng giàu cảm biến hoạt động trong môi trường năng động và quan trọng. Các tính năng sau đây nêu bật cách GMSL giải quyết các thách thức chính liên quan đến thị giác trong robot.
Tốc độ truyền dữ liệu cao và độ trễ thấp.
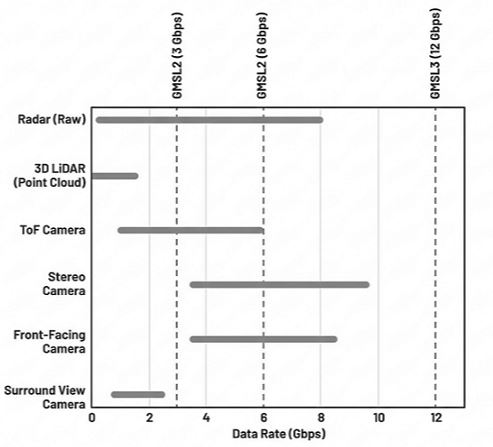
Các dòng sản phẩm GMSL2™ và GMSL3™ hỗ trợ tốc độ dữ liệu kênh truyền (đường dẫn video) là 3 Gbps, 6 Gbps và 12 Gbps, bao phủ một phạm vi rộng các trường hợp sử dụng thị giác robot. Tốc độ liên kết linh hoạt này cho phép các nhà thiết kế hệ thống tối ưu hóa độ phân giải, tốc độ khung hình, loại cảm biến và thông số kỹ thuật xử lý (Hình 2).
Kết nối 3 Gbps là đủ cho hầu hết các camera đa hướng sử dụng cảm biến màn trập cuốn 2 MP đến 3 MP ở tốc độ 60 khung hình/giây (FPS). Nó cũng hỗ trợ các định dạng phát hiện phổ biến khác như cảm biến ToF và LiDAR (Mảng ánh sáng-độ sâu) với đầu ra điểm rung, và cảm biến radar truyền dữ liệu phát hiện hoặc tín hiệu phản hồi dạng hình ảnh được nén.
Chế độ 6 Gbps thường được sử dụng cho camera chính của robot, yêu cầu cảm biến có độ phân giải cao hơn (thường là 8 MP trở lên) để phát hiện vật thể. Tốc độ dữ liệu này cũng hỗ trợ các cảm biến ToF với đầu ra thô, hoặc các hệ thống thị giác lập thể truyền phát đầu ra thô từ hai cảm biến hình ảnh hoặc xuất ra luồng điểm đám mây được xử lý bởi bộ xử lý tín hiệu hình ảnh tích hợp (ISP). Nhiều camera lập thể thương mại hiện nay dựa vào tốc độ dữ liệu này để đạt hiệu suất tốc độ khung hình cao.
Ở phân khúc cao cấp, đường truyền 12 Gbps hỗ trợ camera có độ phân giải 12 MP trở lên được sử dụng trong các ứng dụng robot chuyên dụng đòi hỏi phân loại đối tượng nâng cao, phân đoạn cảnh hoặc cảm biến từ xa. Điều thú vị là, ngay cả một số cảm biến màn trập toàn cầu độ phân giải thấp cũng yêu cầu đường truyền tốc độ cao hơn để giảm thời gian đọc và tránh hiện tượng nhiễu ảnh do chuyển động trong các chu kỳ chụp nhanh, điều này rất quan trọng trong môi trường năng động hoặc tốc độ cao.
Do GMSL sử dụng kỹ thuật song công miền tần số để tách các kênh truyền đi (video và điều khiển) và kênh truyền ngược (điều khiển), nó cho phép giao tiếp hai chiều với độ trễ thấp và có thể cấu hình mà không có nguy cơ xung đột dữ liệu ở toàn bộ tốc độ liên kết. GMSL duy trì độ trễ cực thấp: sự gia tăng độ trễ từ đầu vào bộ nối tiếp GMSL đến đầu ra bộ chia thường thấp hơn vài chục micro giây, điều này là không đáng kể đối với hầu hết các hệ thống thị giác robot thời gian thực. Độ trễ kênh ngược có thể cấu hình cho phép kích hoạt phần cứng chính xác từ máy chủ đến camera, điều này rất quan trọng để thu thập hình ảnh đồng bộ trên nhiều cảm biến, cũng như kích hoạt khung hình theo sự kiện nhạy cảm về thời gian trong các quy trình làm việc robot phức tạp. Để đạt được độ chính xác về thời gian này với các camera USB hoặc Ethernet thông thường sẽ cần thêm một cáp kích hoạt phần cứng riêng biệt, làm tăng độ phức tạp của hệ thống và chi phí cáp.
Kích thước nhỏ gọn và tiêu thụ năng lượng thấp.
Một trong những giá trị cốt lõi của GMSL là khả năng giảm thiểu cơ sở hạ tầng cáp và đầu nối. Bản thân GMSL là một liên kết song công toàn phần, và hầu hết các camera GMSL đều sử dụng tính năng cấp nguồn qua cáp đồng trục (PoC), cho phép truyền dữ liệu video, tín hiệu điều khiển hai chiều và nguồn điện qua một cáp đồng trục duy nhất, giảm trọng lượng tổng thể và số lượng bó dây, đồng thời đơn giản hóa việc định tuyến cơ khí trên các nền tảng robot nhỏ gọn hoặc có khớp nối (Hình 3).
Hơn nữa, bộ chuyển đổi nối tiếp GMSL là các thiết bị tích hợp cao, kết hợp giao diện video (ví dụ: MIPI-CSI) và GMSL PHY trên một chip duy nhất. Mức tiêu thụ điện năng của bộ chuyển đổi nối tiếp GMSL, thường khoảng 260 mW ở chế độ 6 Gbps, rất thấp so với các công nghệ thay thế có thông lượng dữ liệu tương tự. Tất cả các tính năng này giúp giảm diện tích bảng mạch, giảm yêu cầu quản lý nhiệt (thường loại bỏ nhu cầu sử dụng tản nhiệt lớn) và tăng hiệu suất hệ thống tổng thể, đặc biệt là đối với robot chạy bằng pin.

Tích hợp cảm biến và định tuyến dữ liệu video.
Bộ chia GMSL có nhiều cấu hình khác nhau, hỗ trợ một, hai hoặc bốn liên kết đầu vào, cho phép tích hợp kiến trúc cảm biến linh hoạt. Điều này cho phép các nhà thiết kế kết nối nhiều camera hoặc mô-đun cảm biến với một bộ xử lý duy nhất mà không cần chuyển mạch hoặc ghép kênh bên ngoài, đặc biệt hữu ích trong các hệ thống robot đa camera.
Ngoài nhiều đầu vào, GMSL SERDES hỗ trợ các tính năng nâng cao để quản lý và định tuyến dữ liệu thông minh trên toàn hệ thống, bao gồm:
- Giao thức I2C và GPIO được sử dụng để cấu hình cảm biến và đồng bộ khung hình đồng thời .
- Các địa chỉ bí danh I2C được sử dụng để tránh xung đột địa chỉ I2C trong các chế độ truyền dẫn .
- Việc định nghĩa lại các kênh ảo cho phép nhiều luồng video được ánh xạ gọn gàng vào bộ đệm khung hình bên trong của hệ thống trên chip (SoC).
- Việc sao chép luồng video và lọc kênh ảo cho phép phân phối dữ liệu video đã chọn đến nhiều SoC, ví dụ, để hỗ trợ cả quy trình tự động hóa và tương tác từ cùng một nguồn cấp dữ liệu camera, hoặc để hỗ trợ các đường dẫn xử lý dự phòng nhằm tăng cường bảo mật vận hành.
An toàn và độ tin cậy
Ban đầu được phát triển để sử dụng trong các hệ thống hỗ trợ lái xe tiên tiến (ADAS) trên ô tô, GMSL đã chứng minh được hiệu quả trong các môi trường mà an toàn, độ tin cậy và độ bền là những yếu tố không thể thiếu. Các hệ thống robot, đặc biệt là những hệ thống hoạt động xung quanh con người hoặc thực hiện các nhiệm vụ công nghiệp quan trọng, sẽ được hưởng lợi từ các tiêu chuẩn cao tương tự.
Hầu hết các bộ chuyển đổi nối tiếp và bộ chuyển đổi phụ của GMSL được thiết kế để hoạt động trong phạm vi nhiệt độ từ –40°C đến +105°C, tích hợp bộ cân bằng thích ứng giúp liên tục giám sát và điều chỉnh cài đặt bộ thu phát để đáp ứng với những thay đổi của môi trường. Điều này mang lại cho các nhà thiết kế hệ thống sự linh hoạt để thiết kế robot hoạt động đáng tin cậy trong điều kiện nhiệt độ khắc nghiệt hoặc biến động.
Hơn nữa, hầu hết các thiết bị GMSL đều tuân thủ tiêu chuẩn ASIL-B và thể hiện tỷ lệ lỗi bit (BER) rất thấp trong điều kiện liên kết ổn định. GMSL2 thường có BER từ 10–15, trong khi GMSL3 với chức năng sửa lỗi tiến (FEC) cần thiết có thể đạt BER thấp tới 10–30. Tính toàn vẹn dữ liệu tuyệt vời này, kết hợp với sự đảm bảo an ninh, giúp đơn giản hóa đáng kể việc tích hợp bảo mật cấp hệ thống.
Tóm lại, tính ổn định của GMSL dẫn đến giảm thời gian ngừng hoạt động, chi phí bảo trì thấp hơn và sự tin tưởng lớn hơn vào độ tin cậy lâu dài của hệ thống - một lợi thế đáng kể trong việc triển khai cả robot công nghiệp và robot dịch vụ.
Một hệ sinh thái hoàn chỉnh
GMSL được hưởng lợi từ một hệ sinh thái hoàn chỉnh và sẵn sàng triển khai, được xây dựng dựa trên nhiều năm kinh nghiệm sử dụng rộng rãi trong các ứng dụng ô tô và được hỗ trợ bởi mạng lưới đối tác hệ sinh thái toàn cầu rộng lớn. Mạng lưới này bao gồm một danh mục toàn diện các camera, bo mạch xử lý, cáp, đầu nối và phần mềm/trình điều khiển hỗ trợ đã được đánh giá và sẵn sàng sản xuất—tất cả đều được kiểm tra và xác nhận kỹ lưỡng trong các điều kiện thực tế khắc nghiệt dành cho các nhà phát triển robot. Hệ sinh thái này giúp rút ngắn chu kỳ phát triển, dễ dàng tích hợp hơn và giảm bớt các rào cản trong việc mở rộng quy mô từ nguyên mẫu đến sản xuất.
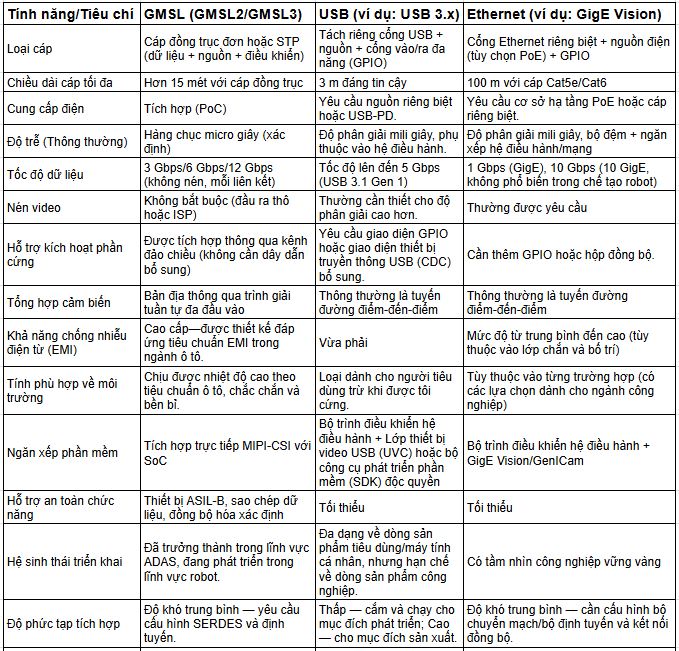
GMSL so với các hệ thống kết nối thị giác robot truyền thống
Trong những năm gần đây, GMSL đã được sử dụng rộng rãi hơn ngoài ngành công nghiệp ô tô, mở ra những cơ hội mới cho các hệ thống robot hiệu suất cao khi nhu cầu về thị giác robot tăng lên với nhiều camera hơn, độ phân giải cao hơn, đồng bộ hóa chặt chẽ hơn và môi trường khắc nghiệt hơn. Các giao diện truyền thống như USB và Ethernet thường gặp phải các vấn đề về băng thông, độ trễ và độ phức tạp trong tích hợp. Giờ đây, GMSL đang trở thành con đường nâng cấp được ưa chuộng, cung cấp một giải pháp mạnh mẽ, có khả năng mở rộng và sẵn sàng cho sản xuất, đang dần thay thế USB và Ethernet trong nhiều nền tảng robot tiên tiến. Bảng 1 so sánh ba công nghệ này về các chỉ số chính liên quan đến thiết kế thị giác robot.
Kết luận
Khi robot được ứng dụng trong môi trường đòi hỏi cao hơn và nhiều trường hợp sử dụng đa dạng hơn, hệ thống thị giác phải phát triển để hỗ trợ số lượng cảm biến lớn hơn, băng thông rộng hơn và hiệu năng có thể cấu hình. Mặc dù các giải pháp kết nối truyền thống vẫn rất quan trọng đối với một số kịch bản phát triển và triển khai nhất định, nhưng chúng lại đi kèm với những hạn chế về độ trễ, đồng bộ hóa và tích hợp, làm giảm khả năng mở rộng. GMSL, với sự kết hợp giữa tốc độ dữ liệu cao, khả năng truy cập cáp dài, nguồn điện tích hợp và độ trễ hai chiều thấp, cung cấp nền tảng đã được chứng minh để xây dựng các hệ thống thị giác robot có khả năng mở rộng. Bằng cách áp dụng GMSL, các nhà thiết kế có thể đẩy nhanh quá trình chuyển đổi từ nguyên mẫu sang sản xuất, tạo ra những robot thông minh hơn và đáng tin cậy hơn, sẵn sàng đáp ứng những thách thức của các ứng dụng thực tế đa dạng.
