




Camera Time of Flight đã cách mạng hóa bản đồ độ sâu và điều hướng tự động trong các phương tiện nông nghiệp. Robot di động tự động Phương tiện vận chuyển tự động (AGV) và hơn thế nữa là liền mạch. Tìm hiểu cảm biến khoảng cách ánh sáng là gì và các thành phần của nó.
Thuật ngữ thời gian bay đề cập đến thời gian cần thiết để một vật thể di chuyển một khoảng cách nhất định qua một môi trường. Trong chuyển động của đường đạn, thời gian di chuyển là tổng thời gian từ khi vật thể được bắn đến khi nó chạm đất hoặc chạm vào bề mặt. Trong công nghệ hình ảnh, kỹ thuật thời gian di chuyển được sử dụng để tính toán độ sâu đến đối tượng mục tiêu hoặc khoảng cách giữa hai vật thể.
Trong bài viết này, chúng ta sẽ tìm hiểu cách sử dụng Time-of-Flight (ToF) trong camera để lập bản đồ độ sâu trong các ứng dụng như robot di động tự động, phương tiện, xe nông nghiệp, đo kích thước tự động, v.v.
Cảm biến ToF là gì và nó hoạt động như thế nào?
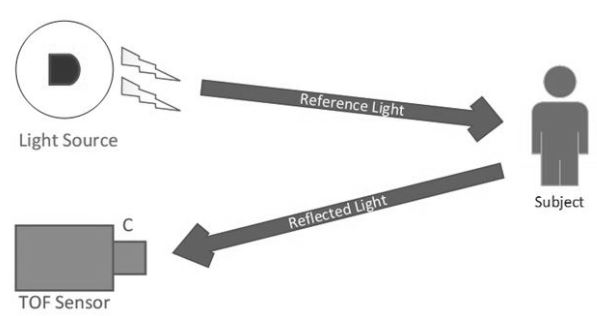
Cảm biến ToF là cảm biến sử dụng nguyên lý thời gian bay để đo độ sâu và khoảng cách. Máy ảnh được trang bị cảm biến ToF đo khoảng cách bằng cách chiếu ánh sáng lên một vật thể có nguồn sáng được điều chế tần số (chẳng hạn như tia laser hoặc đèn LED) bằng cách sử dụng cảm biến nhạy cảm với bước sóng laser (thường là 850 nm hoặc 940 nm) để thu ánh sáng phản xạ. Cảm biến đo độ trễ thời gian là ∆T. Từ khi ánh sáng được phát ra đến khi ánh sáng phản xạ được máy ảnh hoặc cảm biến nhận được. Giá trị độ trễ thời gian này tỷ lệ thuận với gấp đôi khoảng cách giữa máy ảnh và vật thể. Do đó, độ sâu có thể được ước tính như sau:
d = cΔT/2, trong đó c là tốc độ ánh sáng.
Hình ảnh dưới đây cho thấy cách hoạt động của máy ảnh ToF để đo khoảng cách đến đối tượng mục tiêu.
Các thành phần chính của hệ thống camera thời gian bay
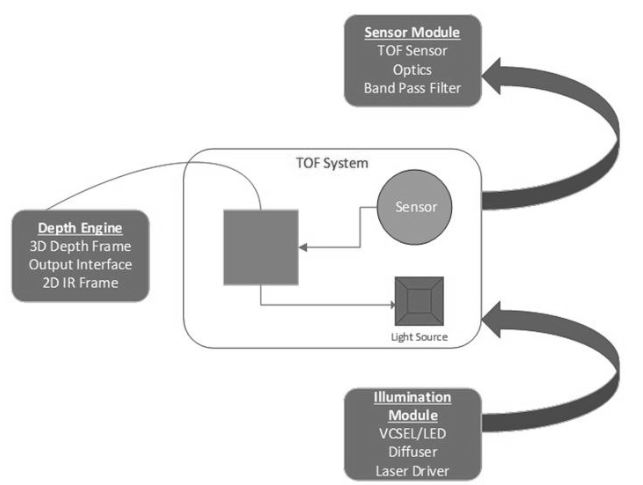
Hệ thống camera thời gian bay bao gồm ba thành phần chính:
- Cảm biến ToF và mô-đun cảm biến
- Nguồn sáng
- Cảm biến độ sâu
Hình ảnh dưới đây minh họa rất rõ các thành phần của hệ thống camera Time-of-Flight:
Dưới đây là một cái nhìn chi tiết về từng người trong số họ.
Cảm biến ToF và mô-đun cảm biến
Cảm biến là một thành phần thiết yếu của hệ thống camera ToF. Cảm biến có nhiệm vụ thu thập ánh sáng phản xạ từ cảnh và chuyển đổi nó thành dữ liệu độ sâu trong từng pixel của mảng. Độ phân giải của cảm biến càng cao thì chất lượng bản đồ độ sâu được tạo ra càng tốt. Mô-đun cảm biến trong máy ảnh ToF cũng được lắp đặt một ống kính, thường có khẩu độ lớn để có hiệu suất thu ánh sáng tốt hơn. Ngoài ra, bộ lọc dải tần (được thiết kế để cho phép ánh sáng có bước sóng 850nm và 940nm đi qua) tối đa hóa hiệu quả truyền quang học của VCSEL.
Nguồn sáng
Trong máy ảnh ToF, ánh sáng được tạo ra bằng cách sử dụng laser hoặc đèn LED VCSEL. Mô-đun này cũng có một trình điều khiển laser, điều khiển thời gian tăng và giảm của dạng sóng ánh sáng với các cạnh sắc nét.
Bộ xử lý độ sâu
Bộ xử lý độ sâu chuyển đổi dữ liệu pixel thô với dữ liệu pha từ cảm biến hình ảnh thành dữ liệu độ sâu. Nó cũng giúp lọc nhiễu và cung cấp hình ảnh hồng ngoại thụ động (IR), cũng có thể được sử dụng trong các ứng dụng khác.
