




Radar hình ảnh bốn chiều (4D) là công nghệ cảm biến độ phân giải cao, bổ sung thông tin theo phương thẳng đứng (độ cao) vào radar 3D truyền thống (khoảng cách, phương ngang, Doppler). Bằng cách thu thập dữ liệu không gian 3D cộng với dữ liệu theo phương thẳng đứng, nó tạo ra một đám mây điểm dày đặc, độ phân giải cao, giúp tăng cường khả năng phát hiện vật thể trong các phương tiện tự hành, giám sát và các ứng dụng công nghiệp, bất kể điều kiện ánh sáng hay thời tiết.
Số lượng radar 4D được sử dụng trong các hệ thống hỗ trợ lái xe tiên tiến (ADAS) rất khác nhau. Các hệ thống cơ bản có thể chỉ có một radar phía trước, trong khi các hệ thống lái tự động cấp cao hơn đòi hỏi các radar mạnh mẽ hơn.
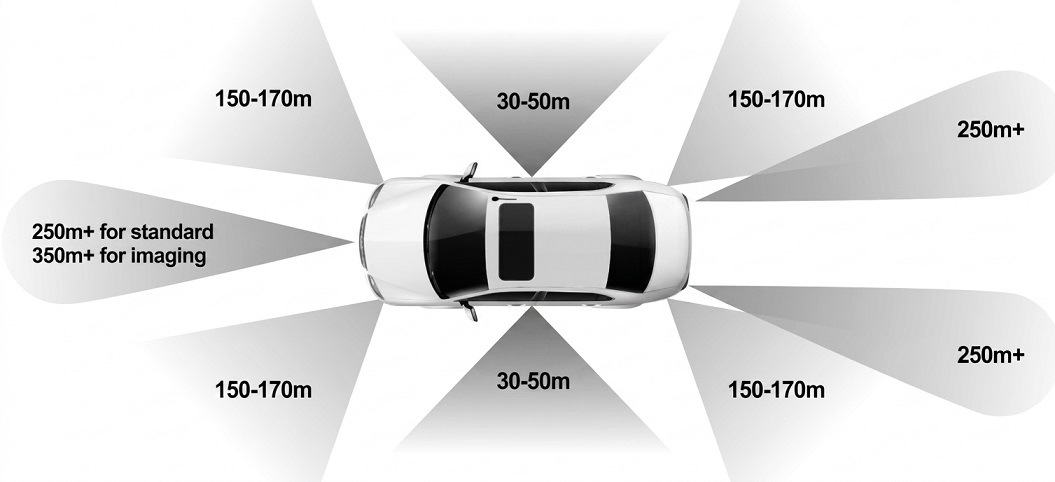
Các hệ thống ADAS hiệu suất cao có thể yêu cầu tới chín hoặc nhiều hơn nữa radar, được đặt ở phía trước, phía sau, hai bên và ở các góc, với các yêu cầu khác nhau về phạm vi phát hiện và độ phân giải ( Hình 1 ). Ngoài các ứng dụng cụ thể như chuyển làn hoặc tránh va chạm, nhiều hình ảnh radar có thể được kết hợp để cung cấp nhận thức môi trường 360°.
Thông tin cơ bản
Radar hình ảnh 4D sử dụng mảng anten đa đầu vào đa đầu ra (MIMO) để tạo ra hàng trăm hoặc hàng nghìn kênh, tăng độ phân giải góc và cho phép tạo ra các "đám mây điểm" dày đặc, thể hiện chính xác hình dạng và vị trí của nhiều vật thể. Đám mây điểm cho phép phát hiện vật thể chi tiết và lập bản đồ môi trường, bao gồm:
- Chức năng đo khoảng cách giúp tránh va chạm, phát hiện điểm mù, chuyển làn an toàn và các chức năng khác.
- Việc đo tốc độ theo dõi tốc độ tương đối của các vật thể chuyển động và dự đoán các mối nguy hiểm tiềm tàng.
- Độ phân giải góc cho phép xác định chính xác vị trí tương đối của cả vật thể chuyển động và vật thể đứng yên.
- Tính năng theo dõi đa đối tượng cho phép giám sát đồng thời xe cộ, người đi bộ, người đi xe đạp và các vật thể khác trong khu vực lân cận.
Việc bổ sung chức năng đo độ cao cho phép radar 4D phát hiện chiều cao của các vật thể, giúp hệ thống phân biệt giữa các phương tiện dừng dưới gầm cầu và các phương tiện ở phía trên.
Công nghệ sóng liên tục điều tần (FMCW) được sử dụng trong hầu hết mọi khía cạnh của radar hình ảnh 4D, bao gồm ô tô, máy bay không người lái, điều khiển quy trình công nghiệp, robot và các ứng dụng khác. FMCW phát ra một luồng sóng vô tuyến liên tục và so sánh các tín hiệu phản xạ của chúng để đo khoảng cách, tốc độ và góc.
Hiệu quả hiện đại
Giống như hầu hết các công nghệ điện tử khác, hệ thống radar 4D đang được phát triển để cải thiện hiệu quả và giảm chi phí. Ví dụ, công nghệ anten đã được phát triển bằng cách sử dụng các đường hầm chứa khí được đúc khuôn để dẫn sóng, giảm tổn thất tín hiệu và cải thiện độ nhạy cho độ phân giải cao hơn.
Hệ thống đang chuyển đổi từ các mạch tích hợp vi sóng nguyên khối (MMIC) đắt tiền sang công nghệ CMOS để cải thiện khả năng tích hợp và hiệu quả chi phí.
Khi radar hình ảnh 4D ngày càng được sử dụng rộng rãi trong nhiều ứng dụng khác nhau, các mô-đun tích hợp đang được áp dụng phổ biến hơn để kiểm soát chi phí và cải thiện hiệu suất. Việc ghép nối nhiều mô-đun tích hợp thay vì các chip thu phát riêng lẻ giúp giảm thiểu mất tín hiệu, lỗi đồng bộ hóa và các hạn chế về nhiệt. Nó cũng có thể giảm chi phí lắp ráp, giảm diện tích mạch in và đơn giản hóa quy trình sản xuất.
Việc sử dụng ăng-ten dẫn sóng tích hợp hoặc các mô-đun đa chip cũng có thể cho phép độ phân giải góc cao hơn và phạm vi hoạt động xa hơn mà không cần công suất cao và quá trình hiệu chuẩn phức tạp như khi xếp chồng các chip riêng lẻ.
Biến chứng do tư thế
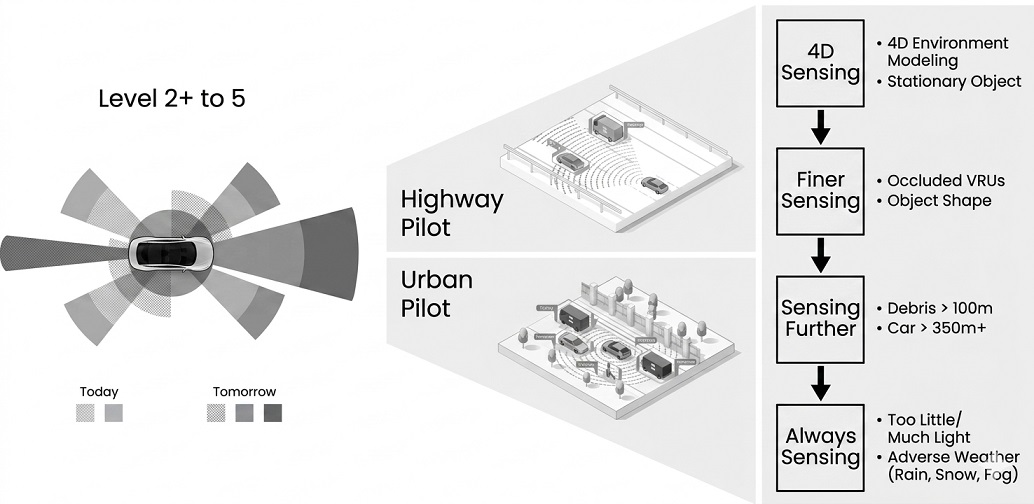
Các nhà quy hoạch đô thị đặc biệt quan tâm đến việc tối đa hóa lợi ích của radar hình ảnh 4D để tăng cường an toàn cho cả người lái xe và người đi bộ. Do đó, hai trường hợp sử dụng chính đã được phát triển: Hệ thống lái tự động trên đường cao tốc (Highway Pilot) và Hệ thống lái tự động trong đô thị (Urban Pilot). Radar hình ảnh được kỳ vọng sẽ đáp ứng nhu cầu của cả hai bên.
Chế độ Lái xe trên Đường cao tốc tập trung vào các tuyến đường thông thoáng và yêu cầu radar 4D có khả năng phát hiện các vật thể chuyển động nhanh ở khoảng cách tương đối xa để hỗ trợ việc điều khiển xe ở tốc độ cao an toàn. Chế độ Lái xe trong Đô thị tập trung vào các môi trường phức tạp hơn ở cự ly gần, bao gồm cả các vật thể chuyển động và đứng yên, và yêu cầu khả năng phát hiện và phân loại đồng thời nhiều vật thể trong thời gian thực.
Các yêu cầu đối với hệ thống Highway Pilot bao gồm độ chính xác ở từng làn đường và tầm nhìn phía trước (FOV) từ 10° đến 30°. Hệ thống Urban Pilot yêu cầu tầm nhìn rộng hơn để phát hiện các vật thể ở cự ly ngắn và trung bình, bao phủ 360°, với radar góc cua cung cấp FOV lên đến 150° để phát hiện vạch kẻ đường và người đi bộ.
Hệ thống Urban Pilot cũng yêu cầu độ phân giải góc cao hơn để phân biệt các vật thể ở gần nhau trong điều kiện giao thông đông đúc và tốc độ thấp. Trong cả hai trường hợp, kỳ vọng về số lượng radar hình ảnh trên máy bay và hiệu suất radar sẽ tăng lên trong tương lai ( Hình 2 ).
Tóm tắt
Radar hình ảnh 4D cung cấp hình ảnh độ phân giải cao được sử dụng trong nhiều ứng dụng khác nhau, từ hệ thống hỗ trợ lái xe tiên tiến (ADAS) cho ô tô đến máy bay không người lái, điều khiển quy trình công nghiệp và robot. Có thể sử dụng nhiều radar để cung cấp nhận thức tình huống toàn diện hơn, và nhu cầu về hiệu suất cao hơn sẽ tăng lên theo thời gian, trong khi chi phí dự kiến sẽ giảm.
