




Thông tin cơ bản về bộ lọc: Khử răng cưa
Tìm hiểu cách bộ lọc khử răng cưa giữ cho tín hiệu của bạn sạch sẽ và chính xác trước khi chuyển đổi
Tóm tắt
Trong một hệ thống dữ liệu được lấy mẫu, các thành phần tần số lớn hơn một nửa tốc độ lấy mẫu "bí danh" (dịch chuyển) vào dải tần quan tâm. Hầu hết thời gian, răng cưa trong một tác dụng phụ không mong muốn, vì vậy các tần số cao hơn "được lấy mẫu" chỉ đơn giản là được lọc ra trước giai đoạn tương tự sang kỹ thuật số (AD). Nhưng đôi khi, việc lấy mẫu thiếu là có chủ ý và răng cưa khiến hệ thống AD hoạt động như một bộ trộn.
Ghi chú ứng dụng này thảo luận về các yêu cầu lọc khác nhau cho hệ thống dữ liệu được lấy mẫu. Nó mô tả răng cưa và các loại bộ lọc có thể được sử dụng để khử răng cưa.
Lọc là một quá trình phổ biến đến mức chúng ta thường coi đó là điều hiển nhiên. Khi chúng ta thực hiện một cuộc gọi điện thoại di động, người nhận sẽ lọc ra tất cả các kênh khác để chúng ta chỉ nhận được kênh duy nhất của mình. Khi chúng tôi điều chỉnh bộ cân bằng trên hệ thống âm thanh nổi, chúng tôi đang tăng hoặc giảm tín hiệu âm thanh một cách có chọn lọc trong một dải tần cụ thể, sử dụng bộ lọc thông dải.
Bộ lọc đóng một vai trò quan trọng trong hầu hết các hệ thống dữ liệu được lấy mẫu. Hầu hết các bộ chuyển đổi tương tự sang kỹ thuật số (ADC) đều được đặt trước bởi một bộ lọc loại bỏ các thành phần tần số nằm ngoài phạm vi của ADC. Một số ADC có bộ lọc vốn có trong cấu trúc liên kết của chúng.
Chúng ta hãy xem xét hệ thống dữ liệu được lấy mẫu, các yêu cầu lọc và mối quan hệ với răng cưa.
Bối cảnh
Thành phần tần số tối đa mà một hệ thống dữ liệu được lấy mẫu có thể xử lý chính xác là giới hạn Nyquist của nó. Tốc độ lấy mẫu phải lớn hơn hoặc bằng hai lần thành phần tần số cao nhất trong tín hiệu đầu vào. Khi quy tắc này bị vi phạm, các tín hiệu không mong muốn hoặc không mong muốn sẽ xuất hiện trong dải tần quan tâm. Điều này được gọi là "răng cưa".
Ví dụ, để số hóa tín hiệu 1kHz, cần có tần số lấy mẫu tối thiểu là 2kHz. Trong thực tế, lấy mẫu thường cao hơn để cung cấp một số lợi nhuận và làm cho các yêu cầu lọc ít quan trọng hơn.
Để giúp hiểu hệ thống dữ liệu được lấy mẫu và răng cưa, chúng tôi xem xét một ví dụ về kỹ xảo điện ảnh cổ điển.
Trong các bộ phim phương Tây cũ, khi một toa xe tăng tốc, bánh xe tăng tốc như mong đợi, và sau đó bánh xe dường như chậm lại, sau đó dừng lại. Khi toa xe tăng tốc hơn nữa, bánh xe dường như quay về phía sau! Trên thực tế, chúng ta biết bánh xe vẫn chưa đảo ngược vì phần còn lại của bộ phim vẫn đang diễn ra. Điều gì gây ra hiện tượng này? Câu trả lời là tốc độ khung hình không đủ cao để ghi lại chính xác độ quay của bánh xe.
Để giúp hiểu điều này, giả sử một dấu hiệu có thể nhìn thấy được đặt trên bánh xe và bánh xe được quay. Sau đó, chúng tôi chụp ảnh nhanh trong thời gian (hoặc mẫu). Vì máy quay phim ghi lại chuyển động bằng cách chụp một số ảnh chụp nhanh nhất định mỗi giây, nó vốn là một hệ thống dữ liệu được lấy mẫu. Cũng giống như bộ phim chụp ảnh rời rạc của bánh xe, ADC chụp một chuỗi ảnh chụp nhanh của tín hiệu điện chuyển động.
Khi toa xe tăng tốc lần đầu tiên, tốc độ lấy mẫu (tốc độ khung hình của máy quay phim) cao hơn nhiều so với tốc độ quay của bánh xe, do đó tiêu chí Nyquist được đáp ứng. Tốc độ lấy mẫu của máy ảnh lớn hơn gấp đôi tốc độ quay của bánh xe, vì vậy nó có thể khắc họa chính xác chuyển động của bánh xe và chúng ta thấy bánh xe tăng tốc như mong đợi (Hình 1a và 1b).
Ở giới hạn Nyquist, chúng ta thấy hai điểm cách nhau 180 độ (Hình 1c). Hai điểm này thường không thể phân biệt được với nhau theo thời gian bằng mắt thường. Chúng xuất hiện đồng thời và bánh xe dường như dừng lại. Ở tốc độ bánh xe này, tốc độ quay đã được biết (dựa trên tốc độ lấy mẫu), nhưng không thể xác định hướng quay. Khi toa xe tiếp tục tăng tốc, tiêu chí Nyquist không còn được đáp ứng nữa và có hai cách khả thi để xem bánh xe. Chúng ta có thể "thấy" nó quay về phía trước và cái kia quay theo hướng ngược lại (Hình 1d).
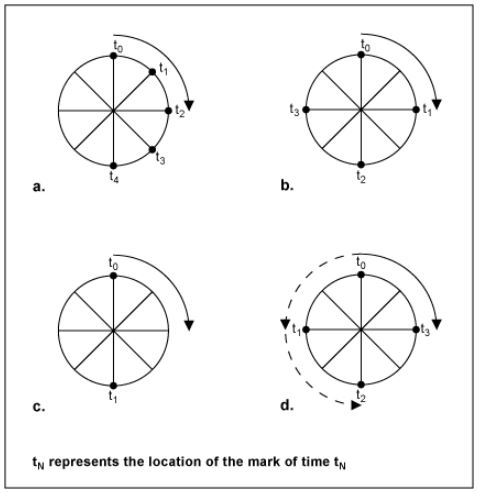
Cả hai đều có thể được xem là hướng chính xác, tùy thuộc vào cách bạn 'nhìn' bánh xe, nhưng bây giờ chúng ta có một tín hiệu bí danh. Nghĩa là, có một thành phần tần số trong hệ thống của chúng ta không mong muốn và chúng ta không thể phân biệt nó với giá trị thực. Cả thông tin chuyển động tiến và lùi đều có mặt. Chúng ta thường thấy thành phần lùi hoặc "bội số phụ" hoặc "hình ảnh" của thành phần chuyển tiếp, bởi vì thành phần chuyển tiếp chính trở nên không đáng chú ý do cách thức mà sự kết hợp của mắt / não xử lý dữ liệu. Một quan sát thú vị khác là tại điểm mà tốc độ lấy mẫu chính xác bằng tốc độ quay của bánh xe, dữ liệu thu được cung cấp rất ít thông tin hữu ích vì dấu sẽ luôn xuất hiện tại cùng một điểm chính xác trên bánh xe. Trong trường hợp này, người ta không thể biết bánh xe đang quay hay đứng yên.
Bây giờ chuyển sang lĩnh vực toán học, giả sử bánh xe là một vòng tròn đơn vị với tọa độ sin và cosin. Nếu một mẫu ở đỉnh dương và âm của các giá trị cosin (lệch pha 180 độ), thì các tiêu chí Nyquist được đáp ứng và các giá trị cosin ban đầu có thể được tái tạo từ hai điểm dữ liệu được lấy mẫu. Do đó, giới hạn Nyquist là điều cần thiết trong việc tái tạo tín hiệu ban đầu. Khi ngày càng có nhiều điểm được thêm vào, khả năng tái tạo tín hiệu ban đầu được cải thiện.
Chuyển sang miền tần số, Hình 2 cho thấy đáp ứng tần số của một hệ thống dữ liệu được lấy mẫu. Lưu ý rằng dữ liệu được sao chép ở bội số của tốc độ lấy mẫu (đây là 'hình ảnh' của tín hiệu gốc); Đây là một đặc điểm cơ bản của hệ thống dữ liệu được lấy mẫu. Trong Hình 2a, tiêu chí Nyquist được đáp ứng và không có răng cưa trong dải tần số quan tâm. Tuy nhiên, trong Hình 2b, lưu ý rằng tiêu chí Nyquist không được đáp ứng như thế nào vì tần số cao nhất trong dải quan tâm lớn hơn một nửa tốc độ lấy mẫu. Vùng chồng chéo là nơi xảy ra răng cưa; tín hiệu ở tần số f T cũng xuất hiện ở fT', tương tự như ví dụ về răng cưa sử dụng bánh xe toa xe.


Lấy mẫu dưới
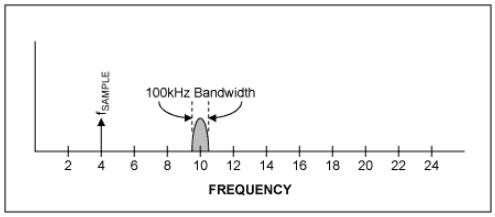
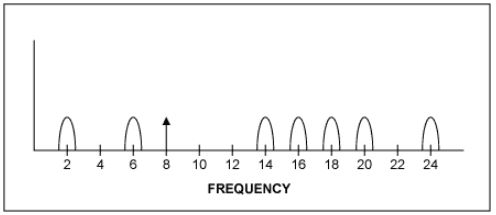
Lấy mẫu dưới là một công cụ mạnh mẽ có thể được sử dụng hiệu quả trong các ứng dụng được chọn. Nó cho phép ADC hoạt động giống như một bộ trộn ở chỗ nó có thể nhận tín hiệu sóng mang tần số cao được điều chế và tạo ra hình ảnh có tần số thấp hơn. Bằng cách này, nó hoạt động giống như một bộ chuyển đổi xuống. Một ưu điểm chính khác là nó cho phép sử dụng ADC có tốc độ lấy mẫu thấp hơn Nyquist, thường có lợi thế đáng kể về chi phí. Ví dụ: giả sử chúng ta có sóng mang điều chế 10MHz với băng thông 100kHz (±50kHz tập trung ở 10MHz). Lấy mẫu thiếu ở 4MHz mang lại các số hạng tổng và chênh lệch bậc nhất (f1 + f2 và f1 − f2) là 14MHz và 6Mz, và các số hạng bậc hai (2f1, 2f2, 2f1 + f2, f1 + 2f2, | 2f1 − f2 |, | f1 − 2f2) | 8MHz, 20MHz, 18MHz, 2MHz, 24MHz và 16MHz. Tín hiệu hình ảnh xuất hiện ở tần số 2MHz là tín hiệu được quan tâm. Lưu ý rằng chúng tôi đã lấy tín hiệu ở 10MHz và bằng cách số hóa nó đã tạo ra một bí danh ở 2MHz. Giờ đây, chúng tôi có thể thực hiện xử lý tín hiệu trong miền kỹ thuật số (lọc và trộn) để khôi phục tín hiệu 50kHz ban đầu. Cách tiếp cận này loại bỏ nhu cầu xử lý tương tự mở rộng, đây là một trong những lợi thế chính của nó. Vì mọi thứ đều được thực hiện trong lĩnh vực kỹ thuật số, để tạo ra những thay đổi về hiệu suất và đặc tính của mạch, chỉ cần sửa đổi phần mềm. Ngược lại, đối với thiết kế tương tự, các thành phần và bố cục phần cứng mạch có thể cần thay đổi để sửa đổi hiệu suất của mạch và điều này có thể khá tốn kém.
Một nhược điểm của việc lấy mẫu thiếu là các tín hiệu không mong muốn có thể xuất hiện trong dải quan tâm mong muốn và bạn không thể phân biệt chúng với tín hiệu mong muốn. Ngoài ra, khi lấy mẫu dưới, dải tần số ở đầu vào ADC thường rất rộng. Trong ví dụ trên, mặc dù tốc độ lấy mẫu của chúng tôi là 4MHz, giao diện người dùng ADC vẫn phải thu được tín hiệu 10MHz. Ngược lại, nếu một bộ trộn tương tự được sử dụng ở phía trước ADC để chuyển tín hiệu sóng mang được điều chế xuống băng tần cơ sở, thì băng thông đầu vào của ADC chỉ cần là 50kHz thay vì 4MHz, nới lỏng các yêu cầu về giao diện người dùng và lọc đầu vào của ADC.
Lấy mẫu quá mức
Lấy mẫu quá mức cung cấp cái được gọi là lợi ích xử lý. Khi bạn lấy mẫu quá mức, bạn đang lấy nhiều mẫu hơn ở tần số lấy mẫu cao hơn mức cần thiết và sau đó lọc dữ liệu, do đó giảm hiệu quả mức nhiễu của hệ thống (chúng tôi giả định nhiễu của chúng tôi là nhiễu trắng băng thông rộng). Điều này khác với tính trung bình, trong đó nhiều mẫu được lấy và tiếng ồn được tính trung bình. Lấy mẫu quá mức có thể được nghĩ theo cách này: nếu tín hiệu đầu vào có nguồn gốc từ nguồn tín hiệu quét tần số đầu vào, phổ tần số có thể được chia thành các dải hoặc "thùng", mỗi thùng có chiều rộng cố định. Tiếng ồn băng thông rộng được trải rộng trên toàn bộ dải tần số quan tâm, vì vậy mỗi thùng có một lượng nhiễu nhất định. Bây giờ nếu tốc độ lấy mẫu được tăng lên, số lượng thùng tần số cũng tăng lên. Trong trường hợp này, lượng tiếng ồn vẫn còn tương tự, nhưng chúng tôi có nhiều thùng hơn để phát tán nó. Sau đó, chúng tôi sử dụng một bộ lọc để loại bỏ nhiễu bên ngoài dải tần quan tâm. Kết quả là mỗi thùng có ít tiếng ồn hơn, và do đó chúng tôi đã giảm hiệu quả sàn nhiễu của hệ thống bằng cách lấy mẫu quá mức.
Ví dụ: nếu chúng ta có ADC 2ksps (chúng tôi sử dụng giới hạn Nyquist là 1kHz trong công thức sau) và tín hiệu là 1kHz, với bộ lọc kỹ thuật số 1kHz theo sau ADC, quá trình xử lý được đưa ra bởi: −10 nhật ký × (1kHz / 1kHz) = 0dB. Nếu chúng ta tăng tốc độ lấy mẫu lên 10ksps, độ lợi xử lý bây giờ là −10 × log (1kHz / 5kHz) = 7dB hoặc khoảng 1 bit độ phân giải (1 bit xấp xỉ bằng cải thiện 6dB về tỷ lệ tín hiệu trên nhiễu (SNR)). Bằng cách lấy mẫu quá mức, nhiễu không giảm, thay vào đó nhiễu đã được lan truyền trên băng thông rộng hơn, đặt một số nhiễu bên ngoài băng tần quan tâm (với bộ lọc kỹ thuật số của chúng tôi) và do đó mang lại hiệu ứng rằng nhiễu đã được giảm bớt. Cải thiện tiếng ồn này dựa trên phương trình sau:
Cải thiện SNR (dB) = 10 × LOGA / B, trong đó A bằng tiếng ồn và B bằng tiếng ồn được lấy mẫu quá mức.
Một cách khác để nói điều này là lấy mẫu quá mức làm giảm nhiễu lượng tử hóa RMS trong băng tần bằng căn bậc hai của tỷ lệ lấy mẫu quá mức. Hoặc, nếu tiếng ồn giảm đi hệ số hai, thì mức tăng xử lý hiệu quả là 3dB. Hãy nhớ rằng chúng ta chỉ nói về nhiễu băng thông rộng ở đây. Các nguồn nhiễu khác và các lỗi khác không thể được loại bỏ một cách đơn giản bằng cách lấy mẫu quá mức.
Bộ lọc chống bí danh
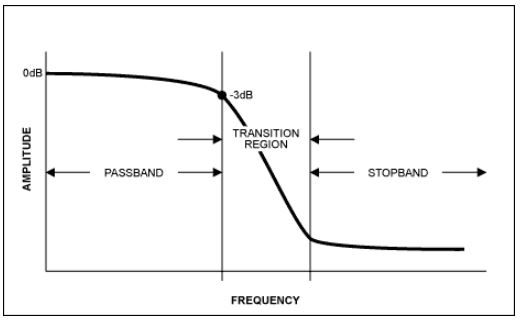
Với nền tảng này, bây giờ chúng ta chuyển sang các bộ lọc khử răng cưa. Khi chọn một bộ lọc, mục tiêu là cung cấp tần số cắt để loại bỏ các tín hiệu không mong muốn khỏi đầu vào ADC hoặc ít nhất là làm suy giảm chúng đến mức chúng không ảnh hưởng xấu đến mạch. Bộ lọc khử răng cưa là một bộ lọc thông thấp thực hiện điều này. Làm thế nào để chọn đúng bộ lọc? Các thông số chính cần quan sát là lượng suy giảm (hoặc gợn sóng) trong băng thông, độ dốc của bộ lọc mong muốn trong dải dừng, độ dốc trong vùng chuyển tiếp và mối quan hệ pha của các tần số khác nhau khi chúng đi qua bộ lọc (Hình 4a).
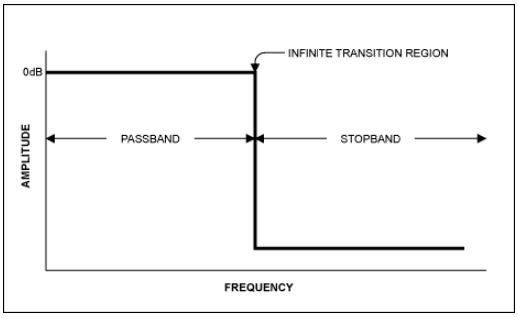
Một bộ lọc lý tưởng có phản hồi "tường gạch" (Hình 4b). Đó là, nó có một tỷ lệ chuyển tiếp vô hạn. Tuy nhiên, điều này không bao giờ xảy ra trong các ứng dụng từ thực. Rolloff càng dốc, 'Q' hoặc hệ số chất lượng của bộ lọc càng cao. Và Q càng cao, thiết kế bộ lọc càng phức tạp. Q cao có thể dẫn đến mất ổn định của bộ lọc và tự dao động ở tần số góc mong muốn. Chìa khóa để chọn bộ lọc là biết tần số và biên độ tương ứng của các tín hiệu gây nhiễu. Ví dụ, trong điện thoại di động, nhà thiết kế biết biên độ và vị trí của tín hiệu liền kề trong trường hợp xấu nhất và do đó thiết kế cho phù hợp. Không phải tất cả các tín hiệu đều có thể được dự đoán trong miền tần số, và thậm chí một số tín hiệu nhiễu đã biết quá lớn để suy giảm đầy đủ. Tuy nhiên, dựa trên môi trường và ứng dụng, bạn có thể tính đến các nhiễu đã biết và thiết kế để giảm thiểu tác động của nhiễu ngẫu nhiên để đảm bảo hoạt động mạnh mẽ hơn.
Khi đã biết các tần số tín hiệu quan tâm, hãy sử dụng một chương trình bộ lọc đơn giản để xác định cấu trúc liên kết bộ lọc cần thiết để đáp ứng các yêu cầu về băng thông, dải dừng và vùng chuyển tiếp. Trong số bốn loại bộ lọc cơ bản, mỗi loại đều có ưu điểm riêng (Hình 5).
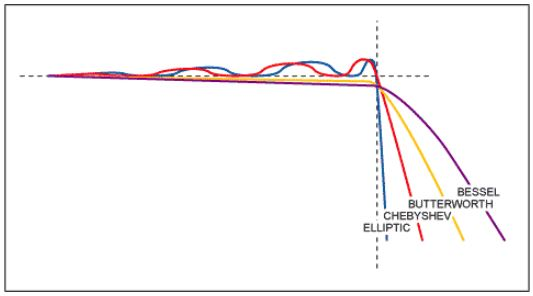
Ví dụ: bộ lọc Butterworth có vùng băng thông phẳng nhất, có nghĩa là nó có độ suy giảm ít nhất trên dải tần mong muốn. Bộ lọc Bessel có sự rolloff dần dần hơn nhưng ưu điểm chính của nó là nó có đáp ứng pha tuyến tính, có nghĩa là mỗi thành phần tần số bị trì hoãn một khoảng thời gian bằng nhau khi nó đi qua bộ lọc. Đáp ứng pha tuyến tính thường được chỉ định là độ trễ nhóm không đổi, vì độ trễ nhóm được định nghĩa là đạo hàm của đáp ứng pha đối với tần số. Bộ lọc Chebyshev có độ dốc hơn nhưng gợn sóng hơn trong băng thông. Bộ lọc Elliptic có tốc độ cuộn dốc nhất. Đối với một bộ lọc khử răng cưa đơn giản, thường thì bộ lọc RC thụ động một cực đơn giản được chấp nhận. Trong các trường hợp khác, một bộ lọc hoạt động (tức là sử dụng bộ khuếch đại op) hoạt động tốt. Một ưu điểm của bộ lọc hoạt động là đối với bộ lọc nhiều bậc, hoạt động của bộ lọc ít nhạy cảm hơn với các giá trị của các thành phần bên ngoài, đặc biệt là giá trị 'Q' của bộ lọc.
Bộ lọc khử răng cưa thường không cần phải chính xác đối với vị trí của tần số góc, vì vậy có một số khoảng trống trong thiết kế. Ví dụ, nếu bạn cần độ phẳng tối đa, nhưng vẫn có quá nhiều suy giảm trong băng thông, chỉ cần di chuyển tần số góc ra xa hơn có thể giải quyết được vấn đề. Nếu độ suy giảm dải chặn quá thấp, hãy tăng số cực trong bộ lọc. Một giải pháp khác là khuếch đại tín hiệu sau khi lọc để tăng độ lớn của tín hiệu so với độ lớn của tín hiệu không mong muốn.
