



Cảm biến ngày càng trở nên phổ biến do chi phí và tính sẵn có liên tục được cải thiện. Tuy nhiên, dữ liệu cảm biến không đơn giản và dễ bị nhiễu cũng như các tác động khác. Sự phức tạp này của dữ liệu cảm biến dẫn đến việc sử dụng kết hợp cảm biến, nhằm mục đích vượt trội hơn so với việc sử dụng cảm biến đơn lẻ bằng cách cải thiện tỷ lệ tín hiệu trên nhiễu, giảm sự không chắc chắn và mơ hồ, đồng thời nâng cao độ tin cậy, độ bền, độ phân giải, độ chính xác và các thuộc tính khác. Điều này đạt được bằng cách sử dụng các cảm biến được chọn để bù đắp cho những điểm yếu của các cảm biến khác hoặc để cải thiện độ chính xác hoặc độ tin cậy tổng thể của quá trình ra quyết định. Trong hầu hết các ứng dụng, tài nguyên tính toán bị hạn chế, và trí tuệ nhân tạo và học máy (AI/ML) có thể xác định chiến lược kết hợp cảm biến tối ưu dựa trên các điều kiện hoạt động thời gian thực.
Phần Hỏi đáp này xem xét các cấp độ khác nhau của phương pháp tích hợp và mô hình hóa dữ liệu, đồng thời giới thiệu một số nền tảng để phát triển và triển khai các ứng dụng tích hợp dữ liệu cảm biến trong Công nghiệp 4.0, Internet vạn vật (IoT), và các ứng dụng xử lý hình ảnh và thị giác máy tính. Các ứng dụng tích hợp dữ liệu cảm biến có thể được phân loại thành ba loại dựa trên mức độ trừu tượng của chúng:
Ghép dữ liệu ở cấp độ dữ liệu là quá trình kết hợp các luồng dữ liệu từ nhiều cảm biến để thu được lượng dữ liệu lớn hơn. Giả định là việc kết hợp các nguồn dữ liệu tương tự sẽ giúp cải thiện độ chính xác và chất lượng dữ liệu. Quá trình ghép dữ liệu này được sử dụng để giảm nhiễu và tăng khả năng chịu lỗi.
Tổng hợp ở cấp độ đặc trưng sử dụng các đặc trưng được trích xuất từ nhiều nút cảm biến độc lập hoặc một nút duy nhất với nhiều cảm biến. Các đặc trưng này sau đó được kết hợp thành một vectơ đa chiều có thể được sử dụng trong các thuật toán nhận dạng mẫu. Thị giác máy tính và các chức năng định vị là những ứng dụng phổ biến của tổng hợp ở cấp độ đặc trưng.
Việc tích hợp ở cấp độ quyết định kết hợp các kết quả cụ thể từ nhiều bộ phân loại quyết định thành một kết quả quyết định tổng thể duy nhất.
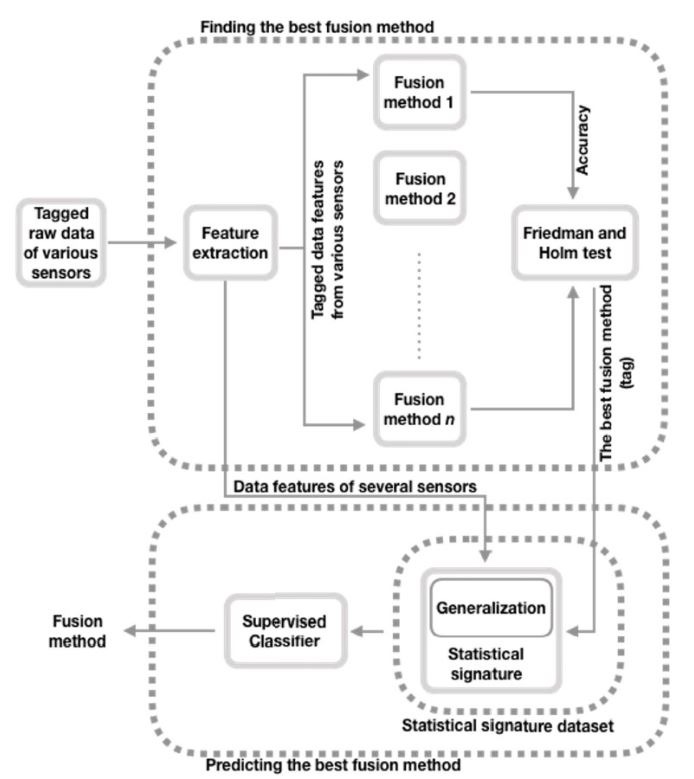
Nhiều phương pháp học máy khác nhau đã được đề xuất để phát triển các thuật toán tích hợp cảm biến tối ưu. Một phương pháp so sánh kết quả của nhiều phương pháp tích hợp cảm biến bằng cách sử dụng phép thử Friedman để phân tích phương sai tuần tự và phương pháp Holmes để chấp nhận và bác bỏ lặp đi lặp lại các giả định về phương pháp tích hợp tốt nhất. Phương pháp này hoạt động tốt khi sử dụng một số lượng cảm biến hạn chế trong các lĩnh vực tương đối đơn giản, chẳng hạn như nhận dạng hoạt động của con người (SHA) đơn giản. Khi các lĩnh vực phức tạp hơn, chẳng hạn như nhận dạng biểu cảm khuôn mặt chính xác về mặt ngữ pháp, yêu cầu nhiều cảm biến hơn, kết quả tốt hơn có thể đạt được bằng cách thêm "bước tóm tắt" vào bước tập dữ liệu chữ ký thống kê (Hình 1). Bước tóm tắt này kết hợp các chữ ký thống kê của các tập dữ liệu từ các lĩnh vực khác nhau, tạo ra một tập siêu dữ liệu lớn, được tóm tắt có thể hỗ trợ các hoạt động tích hợp cảm biến phức tạp và hiệu quả hơn.
Các thuật toán tính toán được sử dụng để kết hợp dữ liệu từ nhiều cảm biến khác nhau, nhận thông tin từ nhiều cảm biến và tạo ra kết quả tổng hợp chính xác và hữu ích hơn so với dữ liệu từ từng cảm biến riêng lẻ. Các thuật toán có thể được kết nối với nhau để đạt được kết quả ngày càng tốt hơn. Các đặc điểm chung của thuật toán tổng hợp dữ liệu cảm biến có thể bao gồm:
Phương pháp làm mịn sử dụng nhiều phép đo để ước tính các biến số, chẳng hạn như Hệ thống Định vị Toàn cầu (GPS), dù là ngoại tuyến hay thời gian thực.
Lọc dữ liệu sử dụng các phép đo hiện tại và lịch sử để xác định trạng thái thời gian thực của các biến số, chẳng hạn như tốc độ.
Ước tính trạng thái dự đoán phân tích các giá trị đã đo được trước đó của các biến, chẳng hạn như hướng và tốc độ theo thời gian thực, để dự đoán các trạng thái hiện tại hoặc tương lai, chẳng hạn như vị trí GPS.
Bộ lọc Kalman
Bộ lọc Kalman, một dạng xấp xỉ bậc hai tuyến tính, là một thuật toán tích hợp dữ liệu cảm biến được sử dụng phổ biến. Nó hoạt động theo cơ chế đệ quy, chỉ yêu cầu phép đo cảm biến hiện tại, trạng thái ước tính gần nhất và một độ bất định đã biết. Ngoài việc tích hợp dữ liệu cảm biến, bộ lọc Kalman cũng là nền tảng cho một số thuật toán học máy. Bộ lọc Kalman hoạt động theo hai bước:
- Quá trình dự đoán đánh giá các biến số trạng thái hiện tại và các yếu tố không chắc chắn, chẳng hạn như các yếu tố môi trường và các yếu tố khác ảnh hưởng đến phép đo của cảm biến.
- Quá trình cập nhật phụ thuộc vào tập hợp các phép đo cảm biến tiếp theo khi bộ lọc cập nhật trạng thái dự đoán, và ước tính được trọng số hóa bằng cách sử dụng độ bất định đã tính toán.
Các nhà phát triển tích hợp dữ liệu từ cảm biến có thể sử dụng bộ lọc Kalman để thu được thông tin tương đối chính xác từ các tình huống có độ bất định vốn có, và để giảm thiểu sai lệch, nhiễu và lỗi tích lũy. Bộ lọc Kalman được sử dụng trong các ứng dụng điều khiển chuyển động để ước tính vị trí theo thời gian bằng cách sử dụng dữ liệu lịch sử và các cảm biến phụ như gia tốc kế và con quay hồi chuyển khi dữ liệu từ nguồn chính, chẳng hạn như tín hiệu GPS, không khả dụng. Bộ lọc Kalman thường được tìm thấy trong robot di động, máy bay không người lái và các hệ thống Công nghiệp 4.0 khác.
Một nền tảng tích hợp cảm biến dành cho Công nghiệp 4.0 và IoT.
Với số lượng cảm biến ngày càng tăng trong các hệ thống Công nghiệp 4.0, nhu cầu về tích hợp cảm biến ngày càng lớn để hiểu được lượng dữ liệu khổng lồ mà các cảm biến này tạo ra. Các nhà sản xuất đang đáp ứng nhu cầu này bằng các thiết bị tích hợp tích hợp cảm biến. Ví dụ, có các hộp giám sát tình trạng thông minh được thiết kế để giám sát tình trạng máy móc bằng cách tích hợp dữ liệu từ các cảm biến rung động, âm thanh, nhiệt độ và từ trường. Các cảm biến về gia tốc, tốc độ quay (RPM), va chạm và rung động cũng có thể được thêm vào.
Hệ thống này sử dụng việc tổng hợp dữ liệu cảm biến thông qua các thuật toán AI để phân loại các điều kiện hoạt động bất thường với độ phân giải cao hơn, dẫn đến các quyết định có xác suất cao hơn (Hình 2). Kiến trúc AI tại chỗ này có thể đơn giản hóa việc quản lý các tập dữ liệu lớn được tạo ra từ việc tổng hợp dữ liệu cảm biến, đảm bảo rằng chỉ những dữ liệu phù hợp nhất mới được gửi đến bộ xử lý AI tại chỗ hoặc lên đám mây để phân tích thêm và có thể sử dụng trong việc huấn luyện các thuật toán học máy.
.png)
Việc sử dụng AI/ML có một số ưu điểm:
- Các thuật toán AI có thể sử dụng việc tổng hợp dữ liệu từ nhiều cảm biến để bù đắp những điểm yếu trong dữ liệu từ các cảm biến khác bằng cách sử dụng thông tin từ một cảm biến duy nhất.
- Các thuật toán AI có thể ưu tiên từng cảm biến cho một nhiệm vụ cụ thể và giảm thiểu hoặc bỏ qua dữ liệu từ các cảm biến được coi là ít quan trọng hơn.
- Thông qua quá trình huấn luyện liên tục, cả trên các thiết bị đầu cuối và trên đám mây, các thuật toán AI/ML có thể học cách xác định những thay đổi trong hành vi hệ thống mà trước đây chưa được phát hiện.
- Các thuật toán AI có thể dự đoán các nguồn gây lỗi tiềm tàng, cho phép bảo trì phòng ngừa và cải thiện hiệu suất tổng thể.
Bộ dụng cụ tích hợp cảm biến cũng có sẵn cho các ứng dụng IoT. Một số bộ dụng cụ được thiết kế để đáp ứng thông số kỹ thuật “Feather” của Adafruit, dựa trên các thông số kỹ thuật bo mạch là một phần của “hệ sinh thái Adafruit Feather”. Bộ dụng cụ này bao gồm hai bo mạch nhỏ: bộ điều khiển “Feather” và bộ phận tích hợp cảm biến “Feather Wing”, được xếp chồng lên trên Feather (Hình 3). Wing chứa một cảm biến áp suất khí quyển độ chính xác cao, một micro MEMS có tỷ lệ tín hiệu trên nhiễu (SNR) cao, một bộ đo quán tính (IMU) và một bộ vi điều khiển. Bộ vi điều khiển này hỗ trợ trí tuệ nhân tạo điện toán biên và có thể xử lý dữ liệu từ micro và các cảm biến khác thông qua các thuật toán tích hợp cảm biến cục bộ để kích hoạt cảnh báo hoặc thông báo.

Bộ điều khiển Feather, được trang bị phần mềm FreeRTOS, hoạt động như một bộ điều khiển IoT kết nối với Wing thông qua Wi-Fi/Bluetooth, cho phép nó tải dữ liệu cảm biến đã xử lý hoặc dữ liệu thô từ Wing lên đám mây AWS để xử lý tiếp.
Bộ dụng cụ tích hợp dữ liệu từ các cảm biến radar và camera.
Các nhà phát triển hệ thống hỗ trợ lái xe tiên tiến (ADAS), xe tự hành, bán lẻ thông minh, Công nghiệp 4.0, robot, tòa nhà thông minh và thành phố thông minh có thể sử dụng bộ cảm biến kết hợp hỗ trợ trí tuệ nhân tạo (AI-SFK) dạng mô-đun, tích hợp dữ liệu từ camera mmWave và radar để phân tích video và học sâu (Hình 4). Dữ liệu từ camera mmWave và radar bổ sung cho nhau, hỗ trợ phát hiện đối tượng, phân loại, khoảng cách, tốc độ và các thông số khác trong thời gian thực. Radar hoạt động ở tần số 77 GHz, và camera màu 8 MP, 4K có thể cung cấp hình ảnh với tốc độ lên đến 21 khung hình mỗi giây.

Bộ công cụ AI-SFK này có thể giảm đáng kể thời gian phát triển. Nó có hai màn hình hiển thị: một màn hình hiển thị hình ảnh vật thể được phát hiện bởi cảm biến radar và màn hình còn lại hiển thị video được ghi lại bởi camera tại cùng vị trí. Việc hỗ trợ nhiều giao diện phần cứng tiêu chuẩn như CAN và USB giúp đơn giản hóa việc tích hợp SFK này vào môi trường phát triển hệ thống tổng thể.
Thư viện AI hiện có bao gồm các ứng dụng trong thị giác máy tính, đồ họa và đa phương tiện. Bộ công cụ này có thể tích hợp các cảm biến khác như ảnh nhiệt và LiDAR, và có thể được mở rộng hơn nữa với các thuật toán học máy và học sâu.
Tóm tắt
Việc tích hợp dữ liệu cảm biến với AI/ML tạo ra các công cụ mạnh mẽ để tối đa hóa lợi ích của nhiều loại cảm biến khác nhau. Việc tích hợp dữ liệu cảm biến được tăng cường bởi AI/ML có thể được áp dụng ở nhiều cấp độ trong một hệ thống, bao gồm cấp độ dữ liệu, cấp độ tích hợp và cấp độ quyết định. Các chức năng cơ bản của việc tích hợp dữ liệu cảm biến bao gồm làm mịn và lọc dữ liệu cảm biến, và dự đoán trạng thái của cảm biến và hệ thống. Các nhà thiết kế có nhiều công cụ và nền tảng tích hợp dữ liệu cảm biến để lựa chọn, giúp đẩy nhanh quá trình phát triển các hệ thống tích hợp dữ liệu cảm biến trong nhiều ứng dụng khác nhau, bao gồm Công nghiệp 4.0, IoT, ô tô, xử lý hình ảnh, và nhiều hơn nữa.
