



Thiết bị phân tích động lực môi trường sao Hỏa (MEDA) trên tàu thám hiểm Perseverance đang nghiên cứu đặc điểm thời tiết bề mặt, cũng như kích thước và hình thái của các hạt bụi. Hiểu được hành vi của bụi là chìa khóa để dự đoán thời tiết trên sao Hỏa. Bụi ảnh hưởng đến thời tiết sao Hỏa theo cách tương tự như nước kiểm soát thời tiết trên Trái Đất. Hai mục tiêu liên quan đến thời tiết của MEDA là: xác định tiềm năng phá hủy của tia cực tím, tính chất quang polymer của bụi dưới tác động của tia cực tím, tốc độ quang phân và sản sinh chất oxy hóa; và ước tính khả năng sinh sống dưới bề mặt dựa trên tương tác giữa đất và khí quyển cũng như nhiệt độ.
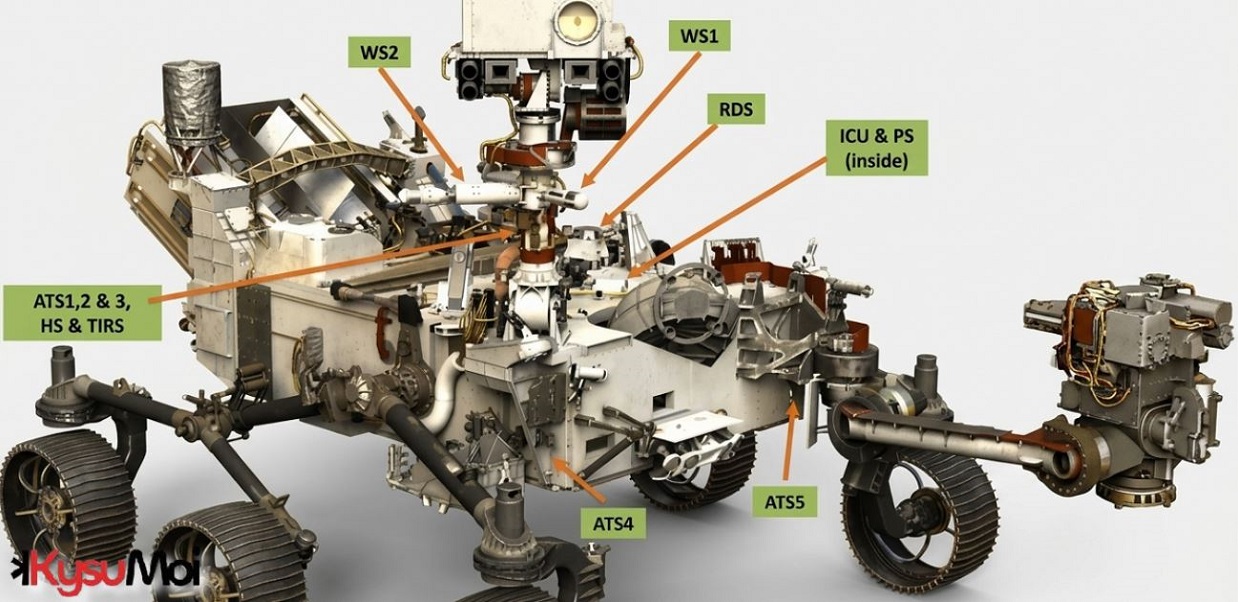
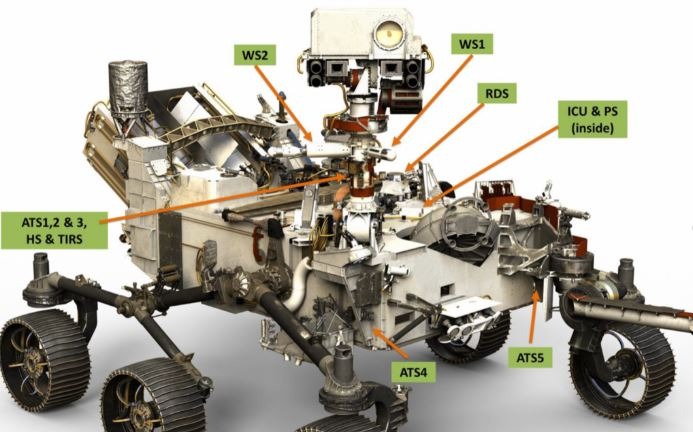
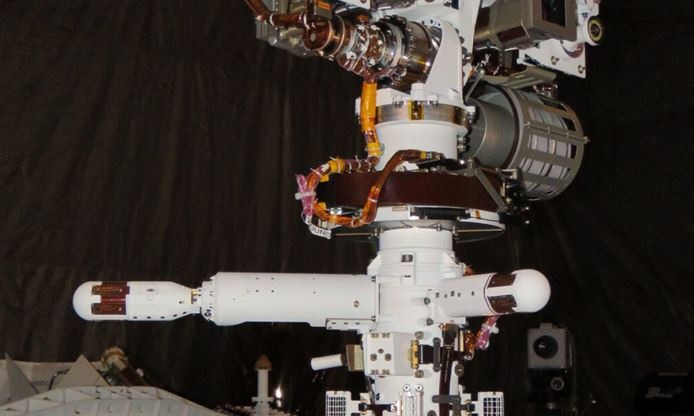
MEDA là thiết bị kế nhiệm Trạm Giám sát Môi trường (REMS) trên tàu thám hiểm Curiosity. MEDA có phạm vi hoạt động mở rộng, tập trung vào việc thu thập nhiều dữ liệu hơn liên quan đến bụi và bức xạ. Ngoài các cảm biến bức xạ và bụi, các cảm biến môi trường của MEDA đo sáu thông số khí quyển: tốc độ/hướng gió, nhiệt độ không khí và mặt đất, áp suất, độ ẩm tương đối và bức xạ mặt trời (tia cực tím, ánh sáng nhìn thấy và tia hồng ngoại). Thiết bị MEDA bao gồm một cụm cảm biến và bộ điều khiển (Hình 1):
- Cảm biến gió WS (hai bộ cảm biến, WS1 và WS2, được gắn trên hai cần trục).
- Cảm biến gió 1 có kích thước 2 x 6,7 inch (5 x 17 cm).
- Hai cảm biến gió có kích thước 2 x 15,75 inch (5 x 40 cm).
- Cảm biến nhiệt độ không khí ATS (năm bộ cảm biến: ba bộ gắn trên RSM và hai bộ ở phía trước xe tự hành)
- Mỗi cảm biến có kích thước 2,25 x 1 x 2,7 inch (5,75 x 2,75 x 6,75 cm).
- Cảm biến nhiệt hồng ngoại TIRS
- 5 x 2,25 x 2,25 inch (6,25 x 5,75 x 5,75 cm)
- Cảm biến độ ẩm tương đối HS
- 2 x 1.0 x 2.8 inch (5.5 x 2.5 x 7.25 cm)
- RDS (Cảm biến bức xạ và bụi) (bao gồm cả hình ảnh SkyCam)
- 2 x 4,5 x 5 inch (13,2 x 11,5 x 12,5 cm)
- Cảm biến áp suất (PS) (nằm trong bộ điều khiển thiết bị (ICU))
- Cảm biến áp suất và ICU: 5,5 x 5,5 x 5,1 inch (14 x 14 x 13 cm)
Cảm biến bức xạ và bụi
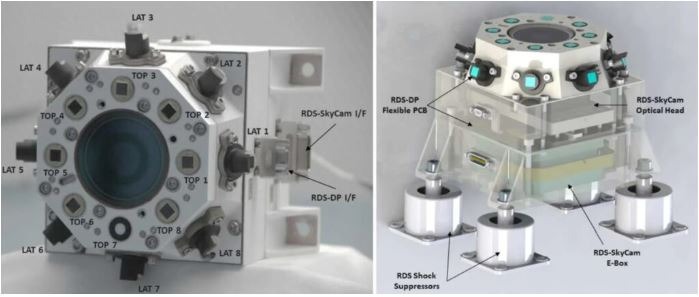
Cảm biến bức xạ và bụi MEDA (RDS) sử dụng sự kết hợp giữa chụp ảnh trực tiếp bầu trời và đo ánh sáng tán xạ ngang đa bước sóng hướng lên bầu trời để theo dõi sự thay đổi theo mùa và hàng ngày về độ dày của sol khí. Ánh sáng tán xạ được đo ở các bước sóng và hướng góc khác nhau bằng cách sử dụng tám điốt quang trong hai bộ, là một phần của bộ tách sóng quang rời rạc RDS (RDS-Discrete Photodetectors hay RDS-DP). Việc chụp ảnh bầu trời được thực hiện bằng camera góc rộng hướng lên trên, gọi là RDS-SkyCam. RDS ghi lại dữ liệu trong năm phút mỗi 30 phút.
RDS là cảm biến phức tạp nhất về mặt điện tử và cơ khí trong dòng MEDA (Hình 2). Nó bao gồm tám điốt quang, trong đó hai bộ được sử dụng trong RDS-DP để đo độ sáng bầu trời theo cả bước sóng và góc ngang. Bộ điốt quang đầu tiên (kênh TOP) hướng lên thiên đỉnh và bao phủ các dải bước sóng tia cực tím, ánh sáng nhìn thấy và cận hồng ngoại, được thiết kế để phân biệt giữa các đám mây bụi và băng nước cũng như đo kích thước của các hạt sol khí. Nhóm tám bộ dò quang kênh LAT thứ hai hướng lên 20° phía trên đường chân trời và trải rộng 45° theo chiều ngang cho mỗi kênh. Tất cả các bộ dò bên được thiết kế để đo độ sáng bầu trời theo các hướng khác nhau đồng thời nhằm mục đích trích xuất thông tin về hình dạng và kích thước của các hạt bụi.
- Mục đích là ước tính kích thước hạt và chỉ số khúc xạ của bụi sao Hỏa bằng cách thu thập độ sâu quang học, suất phản xạ, tán xạ đơn và hàm pha của các hạt bụi theo mùa và thời gian địa phương.
- Mục đích là xác định độ sâu và độ cao của các đám mây băng nước và kết hợp thông tin đó với dữ liệu thu thập từ các hạt bụi để hỗ trợ nghiên cứu về vai trò của các hạt bụi như là nhân tạo nên sự ngưng tụ của mây.
- Mục đích là để đánh giá lượng ôzôn theo mùa và thời gian địa phương, cũng như đo lường ảnh hưởng của mây đến nồng độ ôzôn.
- Để đo bức xạ mặt trời từ tia cực tím đến cận hồng ngoại và quan sát những thay đổi hàng ngày và theo mùa trên bề mặt sao Hỏa.
Cảm biến nhiệt độ không khí
Cảm biến nhiệt độ không khí (ATS) sử dụng các cặp nhiệt điện để đo cấu hình thẳng đứng của nhiệt độ không khí và sự thay đổi khi khí quyển chuyển từ điều kiện đối lưu không ổn định ban ngày sang cấu hình ổn định ban đêm. ATS bao gồm ba cảm biến được đặt xung quanh xe tự hành để hiệu chỉnh ảnh hưởng của xe, cũng như hai cảm biến ở hai bên xe để đo độ dốc nhiệt độ thẳng đứng gần bề mặt. ATS cung cấp các phép đo nhiệt độ ở bốn độ cao: 0 m (trên bề mặt), 0,84 m, 1,45 m và 40 m.
Cảm biến áp suất
Cảm biến áp suất (PS) là một đầu cảm biến áp suất điện dung được chế tạo bằng vi cơ khí. Áp suất làm dịch chuyển các bản cực tụ điện trong cảm biến, làm thay đổi điện dung của nó. Điện dung của cảm biến cũng phụ thuộc vào nhiệt độ, do đó cần có các phép đo nhiệt độ tham chiếu chính xác để diễn giải chính xác điện dung đầu ra. Cảm biến áp suất MEDA bao gồm hai bộ chuyển đổi áp suất (bộ dao động) trên cùng một bảng mạch in nhiều lớp, mỗi bộ có chip ASIC điều khiển riêng và tám kênh chứa cảm biến điện dung, cảm biến nhiệt độ và tụ điện tham chiếu cố định. Cảm biến nhiệt độ được đặt trực tiếp trên bảng mạch in gần cảm biến áp suất để cung cấp các phép đo nhiệt độ chính xác và sạch. Đầu ra của mỗi trong tám kênh trong bộ chuyển đổi là tần số, và kênh tham chiếu với tụ điện cố định được sử dụng để tính toán điện dung của cảm biến từ đầu ra tần số.
Cảm biến độ ẩm
Cảm biến độ ẩm (HS) bao gồm một polyme hoạt tính thay đổi điện dung của cảm biến theo độ ẩm tương đối và nhiệt độ, với phạm vi đo độ ẩm tương đối (RH) từ 0 đến 100%. Phản ứng giữa 0 và 100% RH gần như tuyến tính. Polyme phản ứng với độ ẩm tương đối ngay cả khi thiết bị không được cấp nguồn, do đó có thể thu được các giá trị RH gần như ngay lập tức sau khi hệ thống khởi động. Mạch điện tử của cảm biến độ ẩm sử dụng cùng kiến trúc bộ chuyển đổi như cảm biến áp suất và bao gồm cảm biến HS, tụ điện tham chiếu và cảm biến nhiệt độ PT1000. Tất cả các cảm biến và mạch điện tử liên quan được đặt trong một bảng mạch in nhiều lớp duy nhất được bảo vệ bởi một lồng Faraday xốp bằng kim loại hình cầu được bao bọc trong một bộ lọc bụi polytetrafluoroethylene (PTFE) kỵ nước. HS được thiết kế để cải thiện sự hiểu biết về dòng hơi nước giữa bề mặt và khí quyển bên dưới, cho phép phát triển các mô hình tuần hoàn tốt hơn và ước tính chính xác hơn hàm lượng nước từ các vệ tinh quỹ đạo.
Cảm biến nhiệt hồng ngoại
Cảm biến nhiệt hồng ngoại (TIRS) sử dụng máy quang phổ hồng ngoại (IR) và năm bước sóng để đo bức xạ nhiệt hồng ngoại sóng dài (LW) xuống và lên bề mặt, bức xạ mặt trời sóng ngắn (SW) phản xạ trên bề mặt, độ sáng bề mặt và nhiệt độ không khí ở độ cao khoảng 40 m so với bề mặt. TIRS bao gồm một cảm biến và một tấm điều chỉnh điện tử. Cảm biến bao gồm một vỏ bọc, một tấm đỡ chứa năm cặp nhiệt điện và một tấm hiệu chuẩn. Tấm đỡ làm giảm độ chênh lệch nhiệt độ trong cụm cặp nhiệt điện và được sử dụng để hiệu chuẩn trên tàu trước khi hạ cánh xuống sao Hỏa. Nhiệt độ tham chiếu được cung cấp bởi hai cảm biến nhiệt độ PT1000 dự phòng.
Cảm biến không khí
Cảm biến gió MEDA (WS) được đặt trong hai cần trục nằm cách trục bánh xe của xe tự hành khoảng 1,5 m và xoay cách nhau 120° quanh cột trụ của xe (Hình 3). Xe tự hành Curiosity mang một cần trục cảm biến gió MEDA đời cũ hơn so với mẫu WS trên Curiosity, cần trục này đã bị hư hỏng ngay từ đầu nhiệm vụ, có thể do va chạm với đá trong quá trình hạ cánh. Điều này dẫn đến các phép đo gió không chính xác từ phía sau xe tự hành. Hơn nữa, nhiễu trong hệ thống điện tử của cần trục khiến cho việc đo gió dưới một nhiệt độ nhất định không thể thực hiện được, dẫn đến mất tới 12 giờ dữ liệu đo gió qua đêm. Những vấn đề này đã được giải quyết với MEDA.
Vị trí đặt hai cần WS và khoảng cách 120° giữa chúng được thiết kế để giảm thiểu sự nhiễu loạn của gió đối với phần cứng của xe tự hành. Tuy nhiên, bản thân cột cần cũng ảnh hưởng đến mô hình luồng gió, vì vậy dữ liệu thu thập đồng thời từ cả hai cần phải được kết hợp để tạo ra các phép đo gió và hướng gió chính xác. Mỗi cụm cần WS của MEDA bao gồm sáu bảng mạch cảm biến gió, gấp đôi số lượng được sử dụng trong Curiosity. Các bảng mạch bổ sung này cho phép MEDA đạt được các phép đo gió theo phương thẳng đứng chính xác hơn nữa.
Tóm tắt
MEDA trên tàu Perseverance có những mục tiêu tham vọng hơn so với các sứ mệnh trước đây như Curiosity. Việc hiểu sâu hơn về bụi trong khí quyển và tiềm năng phá hoại của bức xạ tia cực tím, cùng với sự tương tác giữa nhiệt độ khí quyển và mặt đất, sẽ rất quan trọng khi lập kế hoạch cho các sứ mệnh có người lái đến sao Hỏa trong tương lai. Các cảm biến môi trường MEDA được đặt xung quanh và bên ngoài tàu thám hiểm và đo sáu thông số khí quyển: tốc độ/hướng gió, nhiệt độ không khí và mặt đất, áp suất, độ ẩm tương đối và bức xạ mặt trời (tia cực tím, ánh sáng nhìn thấy và tia hồng ngoại), ngoài bức xạ tia cực tím và các hạt bụi.
